1 悬挂式单轨车辆基本结构
1.1 悬挂式单轨车辆分类
悬挂式单轨交通问世和起步于德国,随后在日本得到阔步发展。悬挂式单轨车辆分为非对称式(钢轮钢轨)和对称式(橡胶轮胎)。如图1所示为悬挂式单轨交通车辆分类图。
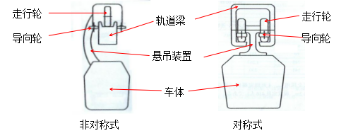
图1 悬挂式单轨交通车辆分类
1.2 悬挂式单轨车辆
本文研究的是一种对称式悬挂单轨车辆,悬挂式单轨车体悬挂于转向架下方,转向架在轨道梁中运行。该转向架结构包括摇枕、构架、走行轮、齿轮箱、导向轮、中心销等。走行轮和导向轮均为实心橡胶轮,固定于构架上,车顶梁通过中心销与构架相连,与车体固结的车顶梁通过空气弹簧坐于枕梁上,并设置了横向、竖向减振器等。构架采用空心钢管焊接结构,降低了工艺难度,减轻了构架重量。牵引电机壳体与齿轮箱壳体固定连接,齿轮箱一端与构架铰接,另一端通过橡胶支撑构架。转向架结构紧凑,可在截面很小的轨道梁中运行。
2 计算模型
根据悬挂式单轨车辆的结构特点,在SIMPACK 9.6动力学仿真分析软件中,建立单节编组的车辆动力学模型。该动力学仿真模型包括车体与两个转向架以及其他连接结构。根据车辆和转向架的结构形式以及建模需求。
对于走行轮轮胎、导向轮轮胎、稳定轮轮胎、牵引拉杆、橡胶垫、空气弹簧、橡胶关节、斜置弹簧减振器等弹性元件,在SIMPACK9.6建模软件中使用力元模拟。其中走行轮的轮胎力用253号力元(Pacejka Similarity)模拟。在SIMPACK动力学仿真分析软件中,没有横向布置的轮胎力元,因此本文使用5号力元(Spring-Damper Parallel Cmp)来模拟转向架构架和导向轨之间的导向力。其中侧风按照集中力处理,受力点为车体侧面形心;偏载按集中力处理,受力点为车体重心横向偏移0.1m位置。转向架构架及车体与惯性参考系Isys之间的铰接采用19号铰(Automotive Track Joint),两个刚体在惯性参考系内均具有6个自由度。每个转向架含有2个轮对,4个走行轮,轮对与齿轮箱之间用2号铰(Revolute Joint be)连接,即走行轮可绕车轴旋转。摇枕和车体之间的空气弹簧用5号力元(Spring-Damper Parallel Cmp)模拟。摇枕与构架之间用1号铰(Revolute Jiont al)铰接。如图2所示为悬挂式单轨车辆平面模型图。
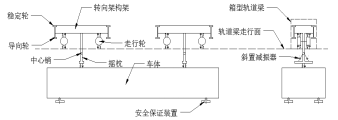
图2 悬挂式单轨车辆平面模型
3 动力学计算
对称式悬挂式单轨车车辆是在箱行轨道梁中运行的,转向架左右设置导向轮,车体是与摇枕通过空气弹簧相连,而摇枕与转向架构架是通过中心销相连。因此,该车不会发生脱轨,且由于轨道梁不能设置超高,所以通过曲线时需要车体自身摆动一定角度来平衡超高。
车辆的未平衡离心加速度取0.5m/s2,计算了车辆在通过50~300半径曲线时的动力学性能。根据转向架设计,轮重减载率应<0.6。车体横移量应<车体与轨道梁立柱间隙500mm。计算的AW0和AW3工况下曲线通过工况,如表1和表2所示。车辆的各指标参数均满足安全性要求。
表1 AW0工况下车辆各项动力学指标
| 曲线半径 | 车体横 移量/mm | 车体侧 滚角/° | 车体摇 头角/° | 走行轮轮重减载率/% | 走行轮最大侧偏力/N | 导向轮径向力/N |
| R50 | 136.27 | 5.74 | 0.13 | 0.17 | 1267.63 | 1872.99 |
| R100 | 70.98 | 5.94 | 0.07 | 0.20 | 859.87 | 2406.49 |
| R150 | 50.72 | 6.38 | 0.09 | 0.24 | 708.07 | 2785.45 |
| R200 | 39.82 | 6.33 | 0.10 | 0.23 | 615.52 | 2822.27 |
| R250 | 33.26 | 6.22 | 0.17 | 0.22 | 538.12 | 2801.88 |
| R300 | 29.64 | 6.43 | 0.11 | 0.16 | 544.67 | 2942.37 |
表2 AW3工况下车辆各项动力学指标
| 曲线半径 | 车体横 移量/mm | 车体侧 滚角/° | 车体摇 头角/° | 走行轮轮重减载率/% | 走行轮最大侧偏力/N | 导向轮径向力/N |
| R50 | 133.05 | 5.81 | 0.13 | 0.16 | 1590.33 | 2620.18 |
| R100 | 71.01 | 6.77 | 0.12 | 0.22 | 980.88 | 3708.03 |
| R150 | 50.81 | 7.34 | 0.08 | 0.25 | 876.91 | 4224.84 |
| R200 | 40.19 | 7.34 | 0.10 | 0.25 | 764.93 | 4314.84 |
| R250 | 33.70 | 7.25 | 0.10 | 0.25 | 703.87 | 4319.72 |
| R300 | 29.88 | 7.49 | 0.14 | 0.26 | 724.96 | 4491.71 |
直线运行平稳性是轨道车辆重要评价指标,根据《铁道车辆动力学性能评定和试验鉴定规范》(GB/T 5599-1985)规定的Sperling指标来评价运行平稳性。仿真速度区间设置为10~80km/h,添加路面激励。从车体的垂向和横向平稳性指标可看出:悬挂式独轨列车在10~80km/h速度区间内其垂向平稳性指标均<1.5,横向平衡性指标均<1.4,达到优秀水平。
4 仿真分析限界方法
计算车辆限界前首先需获取计算车辆的轮廓线,根据制定限界时所使用的车辆,包括各项构造参数、横断面轮廓尺寸及水平投影轮廓尺寸等,来确定车辆横断面上最外点,并连线为计算车辆轮廓线。控制点的选取应充分考虑车体等部件上最大偏移位置,充分表现出不同部件间的运动关系后,范围应尽量小。根据离散得到的车辆轮廓控制点坐标,绘制出悬挂式单轨交通车辆的轮廓线。
在已获取车辆轮廓线的条件下,可根据在基准坐标系下的各个控制点的坐标值,在动力学软件SIMPACK的模型中对应的位置设置marker点。marker点根据控制点实际的所属部件,建立在对应的车辆部件中。然后设置sensor(传感器),利用传感器的功能,直接获取控制点在动态运动的情况下其垂向和竖向的偏移量。
5 计算结果
5.1 悬挂式单轨交通车辆限界
计算车辆(不论空车或重车)在平直线的轨道上按规定速度运行,同时考虑导向轮的安装及制造误差,轨道梁的弹性变形量等,结合动力学仿真软件,获取车辆关键控制点横向和竖向动态偏移后的统计轨迹,并以基准坐标系表示限界。在simpack软件中将侧风载荷和偏心载荷考虑为集中力的形式,其中侧风作用点为车体侧面的形心,偏载作用点为车体重心横向偏移100mm处,风载荷考虑九级风力,即280N/m2。根据车体重量和偏载等可分为两种情况:(1)空车车体 (AW0)+侧风;(2)车体满载(AW2)+侧风+2/3AW2偏载。
经计算可得第2种情况偏移量较大,因此仅列出第2种情况的计算结果,如图3所示。
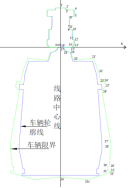
图3 车辆限界
5.2 悬挂式单轨交通的直线设备限界
设备限界考虑为基准坐标系中在车辆限界外加未计及因素和安全间距(包括一系或二系悬挂故障状态)的限界。要求设备限界外的任何设备,包括安装误差值和柔性变形量在内,均不得向内侵入。本文中,悬挂式单轨交通的直线设备限界考是在车辆限界的基础上考虑单侧空簧失气或过充的情况。因此直线设备限界亦分为两种情况:(1)空车车体(AW0)+侧风+空簧失气或过充;(2)车体满载(AW2)+侧风+2/3AW2偏载+空簧失气或过充。经计算可得第2种情况偏移量较大,因此仅列出第2种情况,计算所得的直线设备限界如图4所示。

图4 直线设备限界
5.3悬挂式单轨交通的曲线设备限界
曲线段的设备限界是在直线设备限界的基础上考虑车辆通过曲线时离心力的作用,因此悬挂式单轨交通车辆以25km/h的速度通过半径R50m的曲线设备限界如图5所示。

图5 曲线设备限界
6 结语
综上所述,目前我国尚未有悬挂式单轨限界相关的规范、标准,因此本文通过动力学仿真获取车辆限界、直线设备限界、曲线设备限界作为参考,可指导悬挂式单轨交通设备和建筑的布置,有利于该类车的推广使用以及使用安全性。但动力学仿真计算限界尚有不足之处:(1)仅通过动力学仿真难以将车辆的各子结构的制造、安装误差等考虑在内;(2)在仿真过程中;路面轨道施加的激励不一定与该车在真实运行条件下的激励一致。因此;在工程设计中还需考虑车辆的制造误差、桥梁变形量等因素的影响,以获取更加准确的限界。
参考文献
[1]CJJ 96-2003,地铁限界标准[S].北京:中国建筑工业出版社,2003.
[2]GB 50490-2009,城市轨道交通技术规范[S].北京:中国建筑工业出版社,2009.
[3]肖梯,蒲全卫,陈喜红,等.悬挂式独轨车辆动力学仿真研究[J].机车电传动,2015,(2).
[4]刘文龙,徐延海,吴晓,等.悬挂式单轨交通限界计算研究及方法分析[J].铁道机车车辆,2016,(6).
[5]张力波,王伯铭,杨昕时.基于动力学仿真的悬挂式单轨交通限界计算[J].电力机车与城轨车辆,2016,(5).
基金项目:中铁二院科学技术研究计划“悬挂式单轨交通系统限界研究”KYY2016049(16-18)。
收稿日期:2017-12-04
作者简介:吴晓(1982-),女,四川达州人,中国中铁二院工程集团有限公司工程师,硕士,研究方向:工程设计。





