1 工程概述
苏丹上阿特巴拉水利枢纽工程位于苏丹国东部,在阿特巴拉河与塞特河交汇处上游约20km处,距离苏丹首都喀土穆约480km,设计4台机组,总装机32万kW,总库容27亿m3。该枢纽主要功能为灌溉、供水和发电。大坝总长为13km。上阿特巴拉水利枢纽工程土建分C1-A、C1-B两个标段,总投资约为8.26亿美元。C1-A标段包括厂房、溢流坝、河床土石坝及左右岸土堤等建筑物构成,由中国电力建设集团公司旗下的中国水利水电第七工程局有限公司承建。目前各项施工正在有序地进行。总工期为5年零4个月。
2 GPS技术的概念
GPS的全称是Global Positioning System(全球定位系统),主要功能是导航、测量和授时,于1994年全面建成。GPS测量技术能快速、高效、准确地提供点、线、面要素的精确三维坐标以及其他相关信息,具有全天候、高精度、自动化、高效益等显著特点,广泛应用于测绘领域。
3 GPS在工程测量中的应用
3.1 GPSRTK动态测量
3.1.1 GPSRTK动态测量原理
在工程测量中主要运用的是最新的GPSRTK技术。RTK(Real-time kinematic)实时动态差分法,是一种新的常用的GPS测量方法。这相当于平常说的相对测量方法,其能消除由其他因素引起的系统误差,使得测量成果的精度有很大程度的提高。
3.1.2 GPSRTK动态测量技术的工程应用
(1)地形测量。在苏丹上阿特巴拉项目中,项目工地周边分布着大大小小的弃料场、土料场、砂石料场、石料厂共20余个。最远的料场距离施工现场约19km,且该料场形状呈长条形,料场两端之间长度约5km,最大料场面积达79万m2。以此料场为例,把基站架设在距离料场最近的控制点上,驱车到待测料场附近找一处地势较高的地方,在地上打一根钢筋,尽量打深一点以免被破坏,在钢筋上用红油漆点一个小点作为控制点的标志,之后使用流动站测出这点的坐标并保存,这就完成了图根控制点的测设。然后,把基准站带来架设在图根控制点上即可开始这片地区的地形测量,相对于传统测量测图前繁复的准备工作,GPS要简单许多。
在地形图测图过程中,GPS的流动站自成一体,每一个流动站都是一个完整的测量系统,集信号接收、测量、储存和数据导入导出为一体。工作时,各个流动站也是各自为政、互相不干涉的,可以一台基准站配合多台流动站同时使用,大大增加了工作的效率。
(2)施工放样。在苏丹上阿特巴拉水电项目施工过程中,往往同一个时间段在厂房、溢洪道、土堤等多处地方都需要进行施工放样工作,这时使用GPS进行放样就大大加快了测量工作的效率。以往GPSRTK技术没有运用到施工过程中时,哪里需要放线,哪里就至少需要1台仪器和2个人,在3个地方都需要放线的情况下,就至少需要投入3台全站仪和6个人。而使用GPS进行放样则减少了很多的成本投入,只需要在架设基准站的地方留下1人守站,另外3个人各拿一台GPS流动站分别去需要放线的地方作业即可,这样算下来只投入了4个人和1组GPS,就可满足3个地方同时作业的需要,既节省了人力,也节省了财力,而且就测量人员本身来说,也减少了劳动的强度。而就精度而言,GPSRTK动态测量精度(水平:10mm+1ppm,垂直:20mm+1ppm)也满足开挖工作的需要。
3.2 GPS静态测量
3.2.1 GPS静态测量的原理
GPS静态测量,是利用测量型GPS接收机进行相对定位测量的一种,主要用于建立各种测量控制网。在各个墩标上架设GPS接收机,通过同步观测卫星得出各个控制点的相对位置关系,经过后处理软件进行数据解算,从而得到各个控制点的大地坐标数据。
3.2.2 GPS静态测量的工程应用
苏丹上阿特巴拉项目CA-1及C1-B标段的首级平面控制网就是采用的GPS联测网作为该项目工程施工的平面控制网。
首先,向工程师提交了拟用GPS进行平面控制网建网的申请,对GPS进行外业检验的方法如下:选取3个控制点,然后轮流用6台GPS分别架设在3个点上(见图1),保证每个仪器都会在每一个控制点上架设一次,最后对比6组数据基线向量的差值。
图1 GPS架设点示意图
经实测鉴定,使用的GPS误差在允许范围内,获批准用于建立平面控制网。因为踏勘、选点、埋石等工作已在前期完成,可直接开始外业工作。首先,要对这次控制网测量确立一个基本的作业指导:
(1)本次测量的平面控制网由50个待测点和7控制点组成,等级定为D级,一切流程规范和限差按照《全球定位系统(GPS)测量规范》(GB/T18314-2009)要求执行。
(2)清点需要的设备、人员和车辆。
(3)预计基本工期,编排日程计划,并记录完成情况,随时做出调整。
(4)由于该工程是水电工程,控制网都是沿坝轴线布设的,所以选用条带状边连式网型进行测设。
(5)本次测量每站观测一个时段,一个时段为50min,以最晚开机仪器的开机时间为准。
确定了工作的大体步骤后,即可开始外业观测。将GPS架设在测量墩上(如架设在业主提供的点上则使用三脚架并对中整平),连接接收机和主机,量取天线高并通过手薄将点号和仪器高输入仪器中,等待所有人员架设完毕后使用对讲机通知各点同时开机观测。
控制网测量外业工作共进行了8d,之后进行数据的后处理工作,使用的平差软件是莱卡公司的LGO(LeicaGeoOffice)专业平差软件。
进行基线解算,解算完成后即可看到平面控制网的网形(见图2),图中三角标志为已知控制点,共7个,其他点位为待测点,共50个。
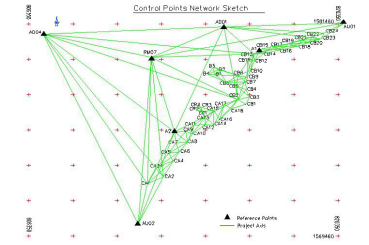
图2 平面控制网的网形
解算完成后检查基线网中是否有点位少测、漏测,如果一切正常则保存基线解算结果,进入平差步骤。进行三维无约束平差,目的是检核GPS网的内符合精度和可靠度。
以网中一点的WGS-84三维坐标作为控制网的基准进行三维无约束平差,对观测值先验中误差、单位权中误差、观测值改正数进行统计分析。经对其进行核查分析,GPS控制网实测基线221条,平均基线长1677.737m。由GPS接受机标称精度3mm+0.5ppm,计算见式(1):
![]() =3.1mm(1)
=3.1mm(1)
式(1)中,![]() -标准差,即基线向量的弦长中误差(mm);
-标准差,即基线向量的弦长中误差(mm);![]() -固定误差;
-固定误差;![]() -比例误差系数(
-比例误差系数(![]() );
);![]() -GPS控制网中相邻点间的平均距离(km)。
-GPS控制网中相邻点间的平均距离(km)。
基线向量改正数Vx=Vy=Vz≤3σ=9.3mm。经检查最大基线向量改正数为8.6mm,基线相对精度最高为1/6282433(AD01-AD04),基线相对精度最低为1/90916(CB19-CB18)。GPS点大地坐标标准差最小为1.0mm(CB2),最大为3.8mm(AU02),由控制网三维无约束平差精度统计数据可知,控制网的基线向量网自身的内符合精度高,基线向量没有明显系统误差和粗差,基线向量网的质量可靠,参加三维无约束平差的观测值没有异常数据存在。
三维无约束平差完成后,向软件中输入已知点坐标进行三维约束平差,目的是将网内各待定点与WGS84坐标系中的已知点联合平差,检查闭合环和组成闭合环各点的精度是否达到规范要求,如果达到精度则可输出坐标作为最终结果。
GPS平面控制网采用首级和次级点同时进行整体平差的方式进行;通过从WGS84坐标系和当地坐标系进行先3D后2D逐步转换后,以标段内联测的已知点作为约束点,在当地坐标系下进行3D约束平差。约束点为A2、AU02、AD04、RM07、AD01、AU01。经平差后,边长相对精度最高为1/5645044,最低为1/90916,高于1/90000。坐标点位标准差最大为±2.1mm(CR4),最小为±1.0mm(CB2),满足施工要求的±10mm的精度要求。
因为苏丹当地采用的坐标系统是Adindan坐标系,在平差完成后还需要将全球坐标系统WGS-84坐标转换为当地坐标。至此,控制网的数据后处理已全部完成,总耗时约10d。
4 结语
综上所述,GPS技术已在社会生产生活中占据了不可或缺的位置,且通过不停探索和升级会变得越来越精确。运用在测量领域的GPS,虽然已在很大程度上帮助了测量人,减轻了工作量,也为单位节约了人力物力,但目前仍不能完全取代传统测量模式,应对其予以客观对待,看到其不足,只有在适当的环境中使用,才能实现效率的最大化。
参考文献
[1]GB/T18314-2009.全球定位系统(GPS)测量规范[S].北京:中国标准出版社,2009.
[2]刘绍堂.工程测量(测绘类)[M].郑州:黄河水利出版社,2010.
收稿日期:2018-03-15
作者简介:魏磊(1974-),男,四川江油人,中国水利水电第七工程有限公司工程师,研究方向:工程测量。





