1 前言
为完成导弹空间运动的控制,原理上可通过导弹的俯仰、偏航和滚动三个通道的姿态控制。如果以控制通道的选择方式作为分类原则,控制方式可以分为三类,即单通道控制方式、双通道控制方式和三通道控制方式。防空导弹稳定控制系统通常采用双通道控制方式,双通道控制方式是进行滚动通道的稳定,通过俯仰、偏航通道控制实现导弹横向机动的控制方式。
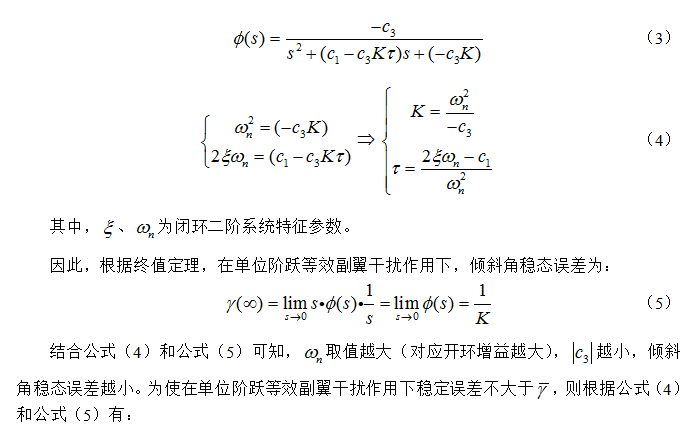
在双通道控制方式下,滚动通道的基本任务是:消除干扰作用下的倾斜角,保持倾斜角为零或尽可能小。倾斜稳定回路设计通常采用倾斜角+倾斜角速度反馈方案形成有静差倾斜角稳定系统,其参数确定过程为:通过配置闭环系统的极点并结合在最大等效副翼干扰作用下,对滚动角稳态误差的要求,确定倾斜角及倾斜角速度(PI控制)反馈系数。
基于PI控制的倾斜稳定控制回路稳态误差与干扰力矩成正比,与回路快速性成反比。当导弹副翼操纵效率较高时,倾斜稳定回路参数设计受舵系统带宽限制,在最大等效副翼干扰力矩作用下,滚动角稳态误差不满足要求。本文通过在线估计滚动干扰力矩并在回路中引入前馈补偿减小等效副翼干扰,进而等效减小倾斜角稳态误差。通过数值仿真验证了该方法的可行性和有效性。
2 弹体滚动运动方程
一般地,轴对称导弹倾斜运动线性化方程描述为:
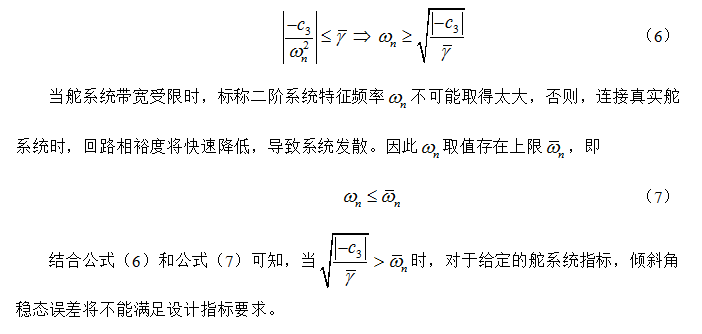
3 自抗扰控制器设计
控制系统的终极目标是消除控制对象输入与输出实际行为之间的偏差,使之快速有效地跟踪输入信号。以经典控制理论为基础,通过误差调节的传统PID控制器反馈策略可以实现上述目标,但是PID存在其固有的弱点。自抗扰控制技术汲取了经典PID控制理论的优点,并充分综合了现代控制理论的精髓,是伴随计算机控制技术日趋完善而发展起来的新型控制系统综合方法。自抗扰控制技术的关键在于把系统的非线性不确定因素统一看作干扰进行观测、估计和补偿,进而采用非线性误差反馈,将非线性问题转化为线性问题。
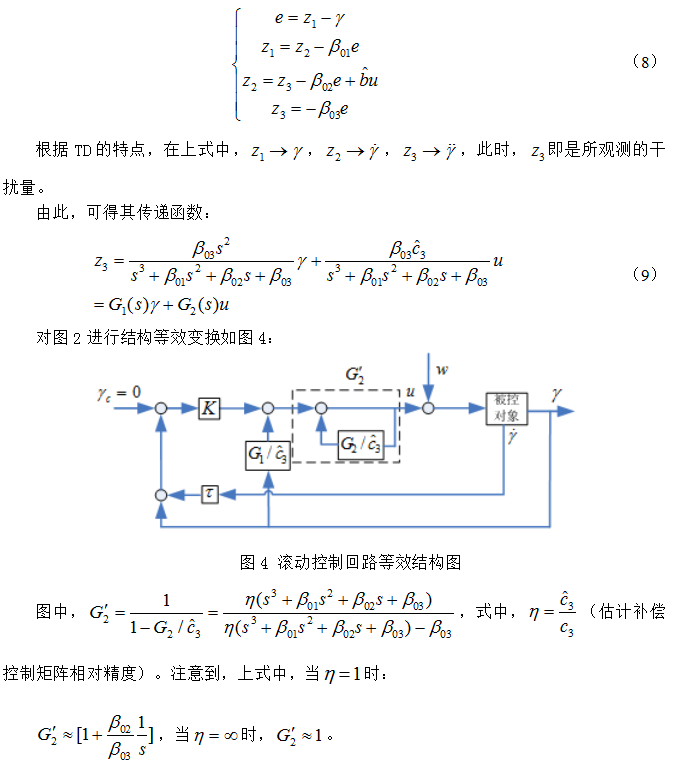
自抗扰控制器包括跟踪微分器(TD)、非线性状态误差反馈(NLSEF)及扩张状态观测器(ESO)三大模块,其结构如图所示。
图2 自抗扰控制原理图
在利用自抗扰控制原理进行滚动干扰估计时,其回路线性控制部分仍然采用常规的比例+积分形式。将此闭环系统作为一个整体,采用自抗扰原理对其干扰力矩进行估计,并形成补偿指令加入原有控制中,形成综合系统,其结构如图3所示。
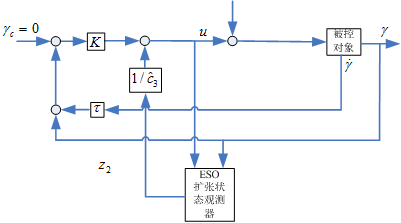
图3 基于自抗扰的滚动干扰力矩估计器原理图
其中,ESO系统方程为:
4 仿真结果分析
为验证设计的正确性和有效性,采用该方法进行控制系统仿真。通过合理选取参数自抗扰控制器参数,得到如下的仿真结果:
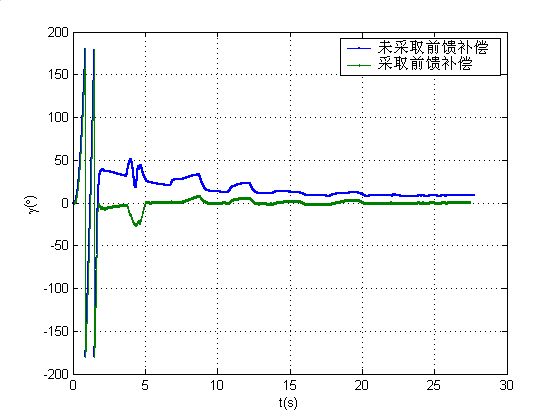
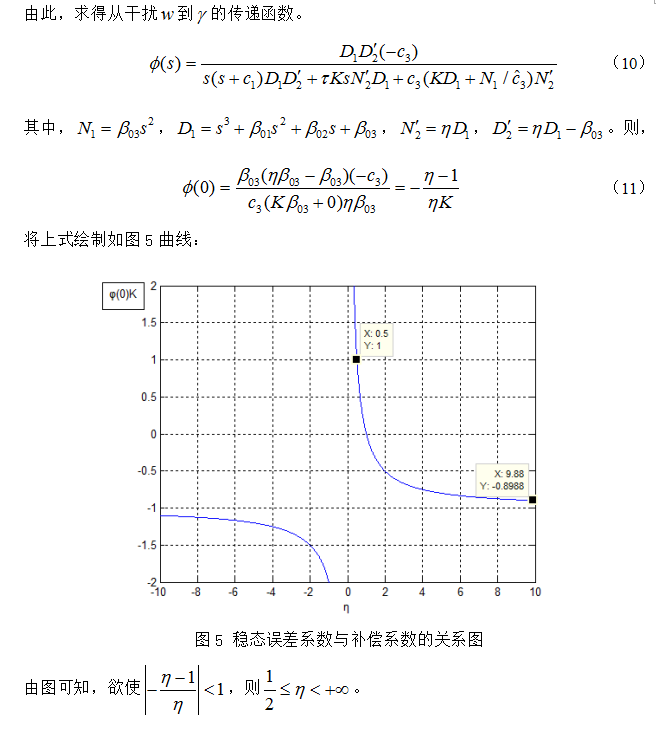
图6 数值仿真曲线
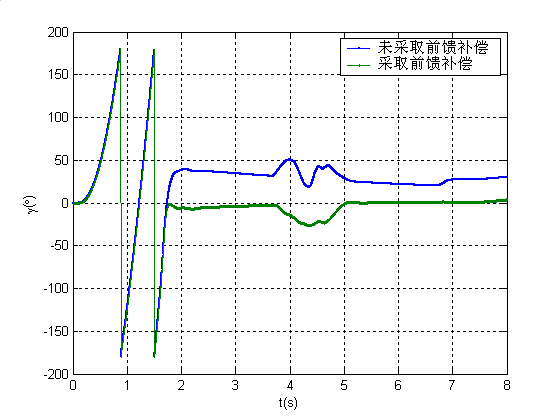
图7 局部放大曲线
由数值仿真曲线对比可知,采用滚动力矩在线估计补偿后,能明显减小倾斜角稳态误差。通过仿真结构可以看出,经滚动力矩在线估计补偿后,倾斜角稳态误差均较小,满足设计要求。同时验证了本文所提出的在线估计模型的正确性和可实现性。
5 结论
本文针对导弹倾斜稳定控制回路设计中面临舵系统带宽受限、副翼操纵效率较高和制造安装偏差引起的滚动干扰力矩过大导致的倾斜角稳态误差过大的稳态,通过采用自抗扰控制器设计思想,将自抗扰控制原理运用于本系统同时对滚动干扰力矩进行在线估计,并进行补偿。通过数值仿真,验证该方法在减小稳态误差方面的效果良好,方法可行。
参考文献
[1]程云龙.防空导弹自动驾驶仪设计[M].北京:中国宇航出版社,1993:193~200.
[2]赵善友.防空导弹武器寻的制导控制系统设计[M].北京:中国宇航出版社,1992:5~11.
[3]韩京清.自抗扰控制技术[J].前言科学,2007,1(1):24-31.
[4]韩京清.自抗扰控制技术—补偿不确定因素的控制技术[M].北京:国防工业出版社,2009:15-31.
收稿日期:2018-07-02
作者简介:陈中祥(1986-),男,重庆永川人,江南机电设计研究所工程师,研究方向:导航、制导与控制。





