1 引言
为满足我国经济及居民生活对电量快速增长的需求,高压、特高压线路里程快速增长,截至2016年底,220kV电压等级及以上的输电线路里程已超过170万km。无人机巡检系统通过搭载可见光采集、激光雷达等设备,通过人工操控实现了输电线路运行信息的精细化采集,并对输电线路三维信息进行建模展示。较传统的人工巡检方式,巡检效率有了大幅提高。现有无人机巡检工作主要依靠人工操控来完成,对巡检人员的操控能力、操控经验要求高,而且易出现疲劳巡检的情况,导致撞击导线、坠机的风险。
如何快速、有效地构建输电线路三维模型,制定自主巡检路线是制约无人机智能巡检的主要因素。麦晓明等利用激光扫描技术获取输电线路走廊数据,并进行三维建模恢复,实现了走廊信息的可视化展示,但是海量的激光点云数据严重制约了三维场景的建模速度。闫丰亭研究了基于地理信息系统(GIS)的三维地形计算,以卫星照片作为地形纹理映射的基础,设并完成了相关数据格式转换算法,但整体计算量较大。基于输电线路无人机实际巡检的需求,本文以地理信息系统(GIS)为输电线路信息源,首先以构建非参数化部件输电线路三维建模方式,抽象化展示杆塔的走向、部件的分布及杆塔间导线的连接分布;其次,计算待巡检部件的三维空间位置,并进行坐标点排序,确定各部件与杆塔、部件间的全局与局部相对位置关系;最后,结合线路走向,形成无人机巡检的航迹及悬停点信息,指导无人机完成输电线路信息的自动采集任务。
2 基于部件的输电线路三维建模技术
输电线路主要由杆塔、导线及其附属部件组成,输电线路的建设有严格的建设标准与建设规范,并且绝大部分杆塔的塔头与塔基具有相似的结构。因此,在进行输电线路三维抽象建模时,基于非参数部件方法,对输电线路各部件依据建设标准进行分解,利用各部件功能关系进行组合,以实现输电线路三维杆塔及其附属部件的灵活三维重建,从而降低建模的工作量与工作难度。
2.1 输电线路部件属性信息构建
为快速获取输电线路部件的属性信息,对接国家电网GIS系统,提取输电线路杆塔GPS信息、杆塔塔型和电压等级,并根据系列电压等级的输电线路设计规范及输电线路施工标准,获取输电线路附属部件信息,形成输电线路部件属性信息的.xml文件。根据输电线路部件属性信息表,可以完成输电线路的三维抽象模型建模,方法流程如图1所示。
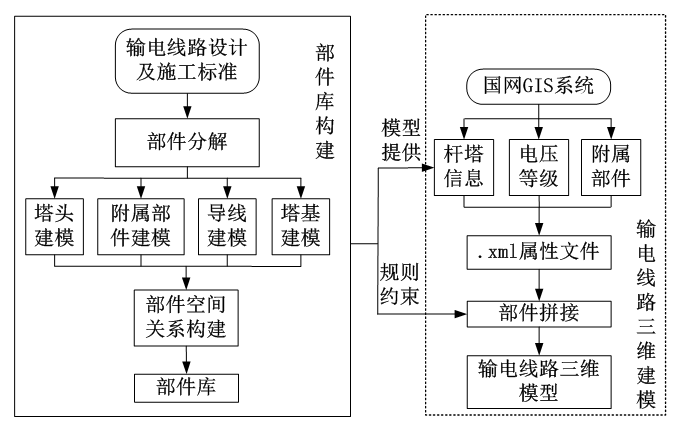
图1 输电线路三维建模流程
2.2 输电线路部件库与三维建模
输电线路部件库主要是为三维建模提供快速的模型,本文将输电线路的三维模型分为:塔头、塔基、附属部件及导线4个部分。首先,通过CAD软件对不同类型的塔头、塔基、附属部件进行三维建模;其次,对不同部件间的空间关系进行记录和维护,以满足输电线路三维模型拼接的需求。
通过对接国网GIS系统获取杆塔信息。塔头主要类型有干字型、酒杯型和猫头型;杆塔按受力性质分为悬垂型和耐张型杆;杆塔按回路数可分为单回路、双回路和多回路;杆塔按用途可分为悬垂型杆塔、耐张直线杆塔、耐张转角杆塔、耐张终端杆塔、跨越杆塔和换位杆塔。各型杆塔塔头结构如图2所示。
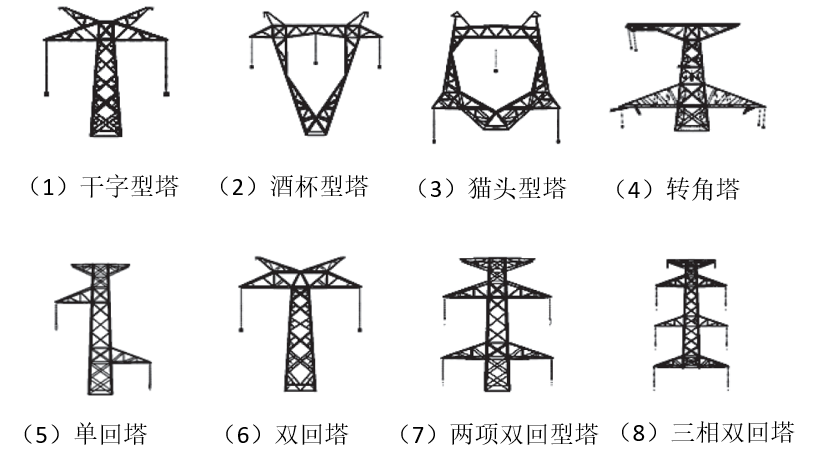
图2 输电线路各型杆塔塔头模型
输电线路杆塔的塔基通常具有相似的结构,塔基间的不同主要在于角铁的排列方式和高度两方面,而在实际的无人机巡检中并不关心角铁的排列形态。因此,本文将塔基抽象成一种形态,如图3所示。塔基的高度与电压等级有密切的关系,如表1所示。

图3 杆塔塔基模型
表1 输电线路塔基高度与电压等级对应表
| 电压等级(kV) | 铁塔高度(m) |
| 110 | 15-18 |
| 154 | 15-18 |
| 220 | 23 |
| 500 | 36 |
| 750 | 45 |
2.3 基于功能关系的杆塔三维重建
杆塔的各部件有明确的功能用途,塔头主要用于悬挂绝缘子与金具等部件,塔基主要用来支撑塔头与大地的连接。基于此,根据对接国网GIS获取到的杆塔型号,自动搜索塔头模型并匹配该塔头的塔基、绝缘子等部件。首先,根据塔头与塔基的功能关系完成杆塔主体的拼接;其次,将绝缘子等部件附着到杆塔主体上,结果如图4所示。
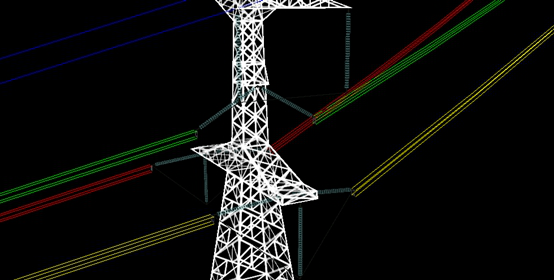
图4 输电线路三维重建结果
2.4 输电线路精细参数调整
对输电线路进行抽象的三维空间建模,除了对本体的几何模型构建外,还要对线路模型的精细参数进行调整。首先,根据相邻的杆塔坐标,对三维空间模型进行走向调整;其次,对三维模型进行几何等比例修正,使模型能够准确表示输电线路实物的物理特性。
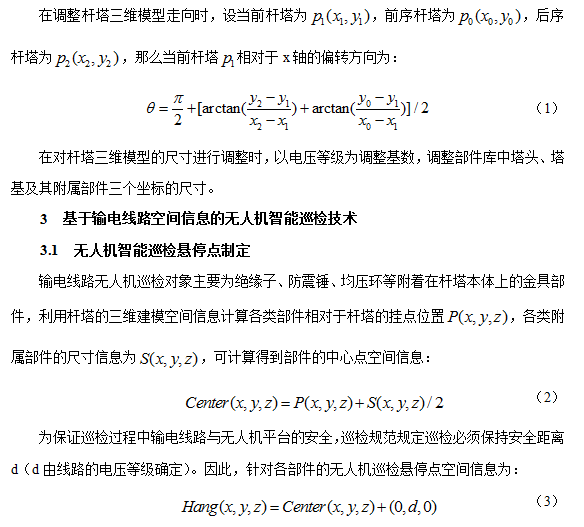
3.2 无人机智能巡检路径规划
巡检应用的无人机具备悬停功能,可实现从一个悬停点到下一个悬停点的直线飞行。依据输电线路走向及悬停点信息,规划智能巡检路径。智能巡检路径按照以下步骤:
(1)对接国网GIS系统,获取杆塔GPS信息及作业班组GPS信息,确定杆塔、线路的走向及无人机巡检前进方向。
(2)根据安全作业距离及导线走向,计算无人机巡检的基准航迹路线。即巡检全局航迹,如果到达目标点,则结束算法。
(3)将每个悬停点依据垂直方向、前进方向、水平方向进行折线型排序,生成局部航迹。
(4)无人机依据三维局部航迹完成一基杆塔巡检后,飞回原全局航迹,继续转至(2)进行飞行。
4 实验测试
4.1 建模结果
以邹川输电线路的某段线路为测试样例,利用非参数的部件重构模式对杆塔进行三维重建,如图5(a)所示。同时,利用无人机携带激光雷达(分辨率为15~20点/m2)对输电线路进行激光扫描并对点云数据进行三维重建,如图5(b)所示。
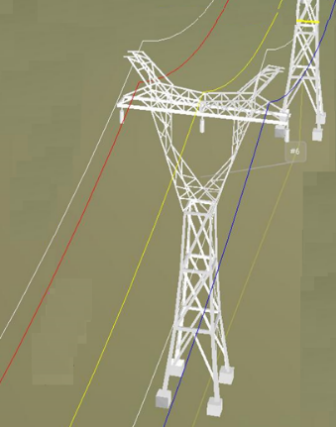

(a)非参数部件三维重建 (b)激光扫描三维重建
图5 三维重建
利用本文方法对杆塔进行建模可以在保证巡检精度的前提下,实现输电线路杆塔的快速三维建模,提高了建模的效率,具体对比结果如表2所示。
表2 杆塔重建效果对比
| 建模方法 | 单基杆塔 | 15基杆塔 | 高度误差 | 挂点误差 |
| 非参数部件重建 | 5min | 48min | 0.23m | 0.11m |
| 激光点云三维重建 | 15min | 220min | 0.12m | 0.06m |
4.2 基于输电线路三维信息的无人机巡检路径规划与智能采集
输电线路精细巡检对象主要包括绝缘子、线路挂点等部件,根据邹川走线路杆塔型号及部件类型,对杆塔单侧悬停巡检路径进行规划,线夹A(15.56,45.31)、绝缘子串B(15.56,46.86),横担C(15.56,51.90),地线挂点D(16.08,55.67),二维巡检路径结果如图6所示。
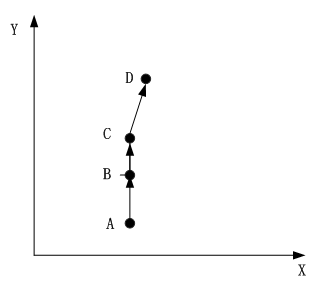
图6 悬停路径规划
传统的输电线路巡检方式为人工操控无人机平台进行数据采集,完成一基杆塔的巡检大约耗时20min,利用智能采集系统进行采集,耗时平均约5min,工作效率可提高4倍以上,而且极大地降低了巡检人员的劳动强度。
5 结论
本文利用非参数部件方式对输电线路杆塔进行了三维建模恢复,具有较高的灵活度且建模效率较高,虽然建模结果较激光点云建模有所误差,但是可以满足输电线路巡检工作的实际应用需求。结合部件位置,制定悬停点并进行路径规划,指导无人机平台进行自主巡检飞行,提高了巡检的智能化水平与巡检的效率。本文从巡检需求、建模速度方面出发,重建的三维模型涉及的部件较少,后期为提高三维建模的复杂度,可以增加均压环、间隔棒等金具结构部件。
参考文献
[1]丁亚洲.无人机倾斜摄影技术在特高压输电线路路径优化中的应用研究[J].低碳技术,2016,(24).
[2]张祥全,苏进军.架空输电线路无人机巡检技术[M].北京:中国电力出版社,2016.
[3]麦晓明,陈驰,彭向阳,等.输电线路走廊三维可视化技术和系统设计[J].中国电力,2015,48(2).
[4]闫丰亭.大规模三维地形建模与渲染的研究及改进[D].青岛:山东科技大学,2011.
[5]兰蕊,刘旭生.输电线路GIS系统中电力线路要素模型库的建立[J].山西大同大学学报(自然科学版),2011,27(3).
[6]金龙哲.输电线路运行[M].北京:中国电力出版社,2010.
基金项目:国网山东省电力公司科技项目资助(项目编号:2017A-124)
(作者严文涛供职于国网山东省电力公司信息通信公司)





