1 耙吸式疏浚船主要构成
耙吸式挖泥船分为单耙或对耙两种类型。一艘现代化的耙吸船除了装备了例如泥泵、耙臂泵、高压冲水系统、波浪补偿器、溢流装置、耙头、泥门等传统设备外,还配备以下几种新技术:
(1)DGPS(差分卫星定位系统)。该系统极大地提高了耙吸船定位和施工控制精度,有效降低了无效土方的产生和施工时间。
(2)SCADA(Supervisory Control And Data Acquisition)数据采集与监视控制系统。通过与施工检测平台的融合,清晰直观地反映了船舶施工状态和各项参数,从而起到了有效辅助和指导施工的目的。降低了施工成本,提升了施工效率。同时数据库内还保留了施工历史记录和数据,可以进行数据整理,分析和统计以及施工视频回放。
(3)DP/DT(动力动态跟踪系统/动力定态跟踪系统)。除提高疏浚船航行自动化程度外,还实现了挖泥船自主就位吹填,自主控制海底管沟的回填掩埋等等。扩大了耙吸船的使用范围。
(4)PMS船舶功率管理系统。有效分配和管理船舶各个设备用电情况,防止过载现象发生。
2 人工智能与船舶无人驾驶
人工智能(Artificial intelligence),与通过人类及其他动物为载体表现的自然智能(Natural intelligence)不同,是一种通过机器来表现的智能形式。在计算机领域AI研究被定义为开发一种能感知其周围环境并采取行动,以最佳方式成功实现预定目标的智能体。一般来讲,当一台机器能模仿“人类认知”功能,例如模仿“人类学习”和“解决问题”时,就可以应用“人工智能”这个术语。
“人工智能”研究目前主要有以下4个分支:
(1)认知(cognitive)。认知计算负责训练人工智能系统“像人的感觉器官一样”的交互,是最受欢迎的一个人工智能分支。广义来说,认知计算基于人工智能和信号处理,开发包括机器推理、自然语言处理、语音识别和视觉(对象及人脸识别)、human-computer交互、对话和叙事生成、情绪分析、风险分析以及其他技术。
(2)专家系统(Expert System)。在人工智能领域,专家系统是模拟人类专家决策能力的计算机系统。专家系统的设计是通过推理和知识机构来解决复杂的问题,主要表现为if-then规则,而不是通过传统的程序代码。第一代专家系统始于20世纪70年代, 然后在20世纪80年代开始逐步推广。
专家系统一般由知识库和推理机两部分组成。知识库一般用于储存该领域专家处理问题时经验数据和结论,推理机的作用则是模仿人类专家的思考方式,提出解决问题具体方案和参考数据。
专家系统一般都具有人机交互功能,在外部对问题描述问题后,推理机会根据问题的特征在知识库中提取相关的数据和知识,因此知识库的优劣直接影响了推理结果的好坏。
(3)机器学习(machine learning)。机器学习为目前主要驱动无人驾驶(无人车、无人飞行器、无人船)的技术,机器学习的核心是一套复杂的统计方法,通过借助云计算与高性能计算机技术,在海量数据中发现细微的趋势和模式,并为机器提供逐步提高处理特定任务的性能和“学习”能力的技术。
(4)深度学习(deep learning)。深度学习源于人工神经网络(Artificial Neural Networks)的研究,是基于数据学习的一种特殊的机器学习,目的在于训练计算机执行类似人类的任务,例如识别语音、识别图像或进行预测。深度学习可以采用半监督,或无监督模式来达到“学习”的目的。
无人船的概念由来已久,发明家尼古拉特斯拉早在1898年船舶控制系统的专利申请中,便提出了自动航海驾驶的概念。上世纪60年代,远程控制的无人艇船队就已广泛用于军事领域。近年来,自动控制、物联网、大数据、特别是人工智能技术的快速发展,为无人船的开发和研制提供了广阔的技术可行性。
3 挖泥船施工设备操作与人工智能应用
由上文可见疏浚船在自主航行和抛泥阶段,随着技术不断成熟,是完全可以运用人工智能达到无人化的。首先,将浚前测量和疏浚测量的结果输入到船控系统中,经过深度学习训练的人工智能系统将很容易识别航道中浅点和需要疏浚的区域;然后,结合雷达和AIS系统,自主规划航线到达疏浚区域进行工作。待泥舱装满后,自主航行至指定抛泥区域抛泥。
因此,此项技术应用的重点和难点应在于在挖泥施工过程中对周围环境的监测以及根据相关数据对船舶设备的控制。例如,在作业中,船舶航速的大小直接影响耙头耙齿对疏浚物质的疏松效果;破浪补偿器(由液压缸,压力罐组成用来调整耙头对疏浚物有效压力)压力的设定也要保证在高低不平的作业区段;此外,泥泵转速、耙管下放角度、耙头调节罩俯仰角度、装舱与溢流控制,都需要有经验的人员结合船上监测数据和自然环境进行操控调节。
在施工过程中,疏浚船自身性能、外界自然环境如风浪的影响、疏浚土质的差异、潮汐潮位的变化等诸多不确定因素都会对疏浚船的产量产生影响。目前,船舶航行、施工工艺和施工方法基本还需船长,船员根据以往经验做出选择判断,若经验不足、选择不慎,则会导致生产效率低下,项目成本大幅提高,无法保证施工作业的最优化,甚至安全问题也会发生。因此,耙吸船人工智能系统的开发应用主要有以下几方面优势:
(1)通过专家系统及机器学习在保证安全和工程质量的前提下,根据疏浚船自身和现场自然条件,对设备施参数进行合理分配和优化选择,从而达到降低能耗,提高产能,减少人为失误的目的。
(2)船上的绝大多数设备,如生活设施、饮食、救生消防设施、防污染设施都是为船上工作人员服务的。在船员较少甚至没有船员的情况下,这些设备将不再需要,从而实现船舶建造,运营成本及能耗大幅降低的目的。
(3)人为决策和操作过失、应急反应不当等因素通常是导致船舶海上事故的主要原因。德国安联保险2012年发布的报告就曾指出,75%~96%的海上事故是人为错误操纵的结果。而在耙吸船人工智能的设计方案中,船舶的操纵主要是通过人工智能系统与远程遥控系统在劳动条件更好的岸上进行操作,从根本上减少甚至消除人为因素对船舶航行安全的影响。
4 人工智能系统初步设计
耙吸船人工智能系统主要由机器学习系统和专家系统组成。同时专家系统由云数据知识库,和推理机组成,耙吸船所用到的所有以往经验数据和设备参数都存储在云数据知识库中,开始作业前由工作人员将本次疏浚工程信息,工程合同质量要求及水深测量结果输入到库中。通过雷达、超声波、摄像系统、GPS等装置实时监控周围自然环境,海面环境及船体设备情况。推理机的作用在于基于数据库中的数据和参数得出施工指令,控制船体和疏浚设备进行施工。将疏浚作业过程及数据反馈至机器学习系统和数据库,由机器学习系统进行反馈调整及学习,并不断调整充实数据库,使施工指令不断优化。自动航行系统则效仿文章此前提到的无人运输船。借助船载相机,传感器和雷达等装置对环境的感知及机器学习系统来实现疏浚船自主航行。
以该系统对耙吸设备的控制为例,通过对工程质量要求,当前施工环境和设备情况等进行分析得出最佳的施工参数,控制船体设备施工。其他解决方案包括抛泥和自动航行等。
本次设计的耙吸船人工智能系统总体结构图如图1所示。
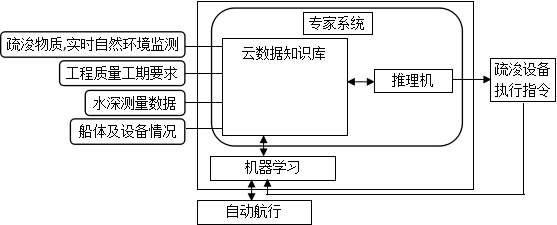
图1 耙吸船人工智能系统总体结构图
人工智能系统工作的过程如下:
(1)确定当前疏浚船的施工状态。首先,在施工前施工人员要对疏浚区域的土质进行勘测确定土质类别;然后,将土质类别和航道浚前测量结果,及疏浚过程中的航道测量结果及时输入到数据知识库中。
(2)利用专家系统中的相关知识推理出当前施工条件下挖泥船的最佳施工计划,施工计划应可根据由雷达、超声波、摄像系统、GPS等装置感知的天气和海面情况,以及监视系统和传感器感知的船上设备进行实时调整。
(3)根据专家系统的相关知识推理出当前施工条件下挖泥船的最佳工况点。工况点涉及的疏浚参数有泥浆浓度、泥浆流速和泥泵转速等,根据专家系统数据知识库中存储的相关经验数据,结合疏浚物质类别,运用推理机推理确定最佳工况点。
(4)根据最佳工况点确定耙管、耙头、高压冲水系统、破浪补偿器等设备的施工参数,下达设备执行指令,同时按需要调整船速。船上各设备共同承担疏浚任务,工作状态相互影响,通过人工智能系统协调控制各个设备,在疏浚施工参数满足相关约束的前提下,使耙吸船达到最佳工况。监控泥舱和溢流装置,泥舱装满时控制耙吸船行驶至指定抛泥地点,打开泥门抛泥,然后返回作业区继续循环作业。
(5)实时监测设备和工况,将信息反馈机器学习系统,不断进行学习优化,并将学习结果反馈数据库,持续补充和修改数据知识库。同时,机器学习系统通过自然环境反馈和障碍物识别调整航迹,并不断完善船舶自动航行功能。
5 结语
综上所述,本研究基于人工智能领域的最新理论,结合耙吸式疏浚船的作业方式和工作特性,初步提出了耙吸式疏浚船人工智能系统设备控制解决方案和系统总体结构图,同时探讨了该人工智能系统的应用前景及其巨大优势。随着工程实践的不断积累,研究成果也将得到进一步修订和完善。
参考文献
[1]耙吸挖泥船疏浚监控系统:GB/T 29135—2012[S].北京:中国标准出版社,2013.
[2]邹绍云.基于专家系统的挖泥船作业辅助分析与优化决策研究[D].武汉:武汉理工大学,2012.
收稿日期:2018-08-24
作者简介:彭博(1986-)男,天津人,中交第一航务工程勘察设计院有限公司工程师,硕士,研究方向:工程监理。





