0 引言
从20世纪70年代开始,美国、英国、德国等发达国家开始进行无人驾驶汽车的研究。经过多年的研究,美国机动车工程师学会(Society of Automotive Engineers,SAE)形成了对无人驾驶的划分等级,见表1。
表1 SAE无人驾驶的等级划分
| SAE分级 | SAE命名 | 定义 | 系统功能 | 区域 |
| 0 | 无 | 驾驶员完全控制 | 无 | 任何 |
| 1 | 辅助驾驶 | 驾驶员完全控制 | 辅助驾驶员执行ACC/LKA/AEB等 | 限定 |
| 2 | 部分自动驾驶 | 驾驶员连续监测系统完成部分功能 | 加速、转向或刹车中介入车辆控制 | 限定 |
| 3 | 有条件自动驾驶 | 系统提前预测状态提醒驾驶员接管,允许驾驶员监管同时做其他工作 | 高速、封闭道路、自动泊车、自动召回等 | 限定 |
| 4 | 高度自动驾驶 | 不需要驾驶员接管车辆控制权 | 特定环境中可以执行全部驾驶任务 | 限定 |
| 5 | 完全自动驾驶 | 不需要驾驶员接管车辆控制权 | 全功能 | 任何 |
无人驾驶分为0~5这6个等级。但直至今日,无人驾驶汽车还只能达到第3级,在特定的环境和区域内可以达到4级,并没有能够实现完全自动驾驶。现今汽车上配备的“无人驾驶”系统,只是起有条件自动驾驶的作用,实际还需要驾驶员对车的最终干预与控制。无人驾驶汽车可以有效的增加驾驶的安全性、减少交通拥堵、使人们出行便捷。现如今,谷歌、雷克萨斯、沃尔沃、宝马、奥迪等大型企业走在无人驾驶汽车的前沿,正大力着手于对无人驾驶汽车的研发投入,并试图实现真正意义上的无人驾驶。
当无人驾驶汽车在路上行驶时,必须要清楚地知道该路段的所有交通标志,如实虚线、掉头标志、红绿灯、限速标志等,进而还需要知道实时路况,比如当前路段是否发生交通事故,是否拥堵。所述这些,恰恰是普通导航地图无法实现的,需要高精度地图精准、详细的道路、路况信息,使其能安全、平稳地行驶在路上。所以,高精度地图的研发,无疑是无人驾驶汽车投入社会的基础。
1 无人驾驶技术研究现状
1.1 国外研究现状
从20世纪70年代开始,美国、德国等一些发达国家逐步开始了对无人驾驶技术的研究,并已经取得了不错的成绩。现阶段,谷歌走在无人汽车的研发前列。目前,其研发的无人驾驶汽车通过使用谷歌地图来掌握实时路况,通过车载摄像机、雷达传感器、激光测距仪来控制更加细微的情况,如刹车、加速、转向等,达到了SAE的第3级别的无人驾驶。德国研究人员在车辆上安装了激光摄像机、智能计算机、全球定位仪等设备,使汽车能够自主在道路上行驶。
1.2 国内研究现状
从20世纪80年代起,我国逐渐开始涉足无人驾驶汽车的研究。在1992年,国防科技大学首次成功研制出我国第一辆无人驾驶汽车。目前,一汽集团、长安汽车等我国大型汽车企业以及腾讯、阿里巴巴、百度等大型互联网企业正致力于于无人驾驶汽车的研发。据我国专家的估计,在2020年前后,我国的追尾问题将得到极大缓解,那时无人驾驶技术将更加广泛地应用于普通汽车上,进而实现辅助驾驶。在2030年,我国大部分汽车将实现半自动驾驶,该种汽车自动驾驶系统能够在特定的路段或短时间内代替驾驶者承担操控车辆的职能,但是仍需驾驶者对汽车活动进行监控。
2 现有导航技术存在的问题
2.1 对路况描述不充分
当前的地图多为电子导航地图,电子导航地图是用于具有GPS设备上的导航地图软件,其主要作用是显示周围的道路情况,为驾驶员提供准确的驾驶信息。电子导航地图是由道路、背景、标注和POI(Point of Interest,兴趣点)组成。但导航地图仅仅是把路况信息抽象的表达出来,马路仅仅是由普通的曲线、线段来标示,大部分标示如实虚线、转向标、禁止鸣笛等标识在普通导航地图很难得到体现。在驾驶的过程中,驾驶员需要结合实际道路情况,观察行车指示标识,再根据导航地图提供的信息分析,这样才可以选择出合适的路径。因此,对路标信息的辨识与整合这项工作是无人驾驶汽车很难去完成的。所以适用范围仅为人类驾驶员的普通导航地图并不能满足无人驾驶汽车的要求。
2.2 实时性不佳
当前的电子导航地图不能够实时的更新汽车周围所有的交通信息,比如信号灯的位置和当前指示,道路标示线的类型,提示哪些道路正在施工、交通管制、封路、拥堵、发生交通事故等。这也是制约当前的电子地图运用到无人驾驶车上的一个重要原因。
综上所述,当前使用的电子导航地图不能够满足自动驾驶汽车对导航地图的要求,因此需要在导航地图上进行改进。现在,工业界提出了一种新的导航地图——高精度地图。高精度地图是指精细并且精度高的地图,其精度可以达到厘米级别,因此可以来区分车道。高精度地图包含有大量的车辆辅助信息,比如道路的几何结构,道路标示线的位置,周边的实时道路环境等。高精度地图可以实时的更新汽车周围所有的交通信息,比如信号灯的位置和当前指示,道路标示线的类型,提示哪些道路正在施工、交通管制、封路、拥堵、发生交通事故等。此外,高精度地图可以帮助汽车自动识别身边的障碍物、行人或一些突发性的障碍。以上均为无人驾驶汽车投入使用前所必须具备的,而这些电子导航地图并不能完全解决,所以需要研发出高精度地图来弥补电子导航地图的不足。
3 应用高精度地图
成熟的无人驾驶,是能够自动识别自身位置、确定行驶路线、完全由汽车自身完成所有的驾驶任务、保障行驶的安全、能够应对所有情况、能平稳舒适的将人送达目的地。然而这些,需要高精度地图与无人驾驶汽车的完美结合。
高精度地图并不仅仅是电子导航地图在形态和精度上的简单提升,其数据采集、数据加工的方式都需要进行大大的技术提升。高精度地图主要由道路网数据、车道网数据、安全辅助数据和道路交通设施数据组成,这四部分数据的作用分别为描述道路几何形态;车道级的道路显示、路径规划;辅助车道级定位和显示;标示出所有的交通标识,如图1所示。
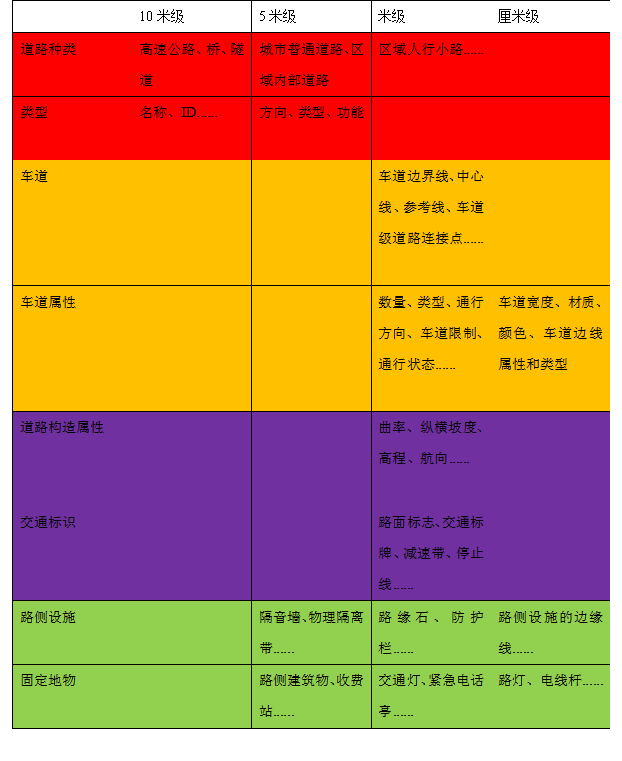
图1 高精度地图结构图
高精度地图通过其达到厘米级的精度,可以为无人驾驶汽车提供道路上需要的所有信息,如什么路段正在禁行或拥堵、交通标示、车边所有障碍物等。
通过数据采集车进行道路的数据采集,然后再通过整合即可得到高精度地图。无人驾驶汽车通过车载陀螺仪、激光雷达、全球定位系统(Global Positioning System,GPS)、轮测距器给出当前无人驾驶汽车的位置预测进而在计算出无人驾驶汽车的准确位置,然后通过计算出的准确位置和激光扫描的数据,把这些新得到的数据加入进高精度地图中,但是采集任务的工作量庞大,需要让采集车驶过每一条路段,而且在采集完成后,各条路段的情况都会发生变化,所以要周期性的更新路段数据,显然是很困难的。然而,可以在每一辆无人驾驶汽车上都安装采集装置,这样所有的无人驾驶汽车都可以提供数据的更新。通过以上的流程,无人驾驶汽车就可以知道到达目的地所需要行驶的路线、车边实虚线的位置、交通信号灯的位置及其当时的标示情况、限速标示、掉头标识、车边的所有障碍物、所经路段是否出现拥堵、禁行、交通管制等,进而准确无误的判断出下一步是否需要做出减速、加速、变道、刹车、转向、掉头、更改线路等行为。高精度地图与无人驾驶汽车的应用,可以有效增加交通管理部门对车辆的监管把控,有效避免了酒驾、疲劳驾驶等情况的发生,大大减少了交通事故的发生,使我们的出行更加便利。
目前,易图通与我国某汽车企业首次合作项目,将高精度地图与无人驾驶汽车结合在一起,易图通提供的高精度地图可以辅助无人驾驶汽车达到无人驾驶技术的第二级别与第三级别之间,可以实现一系列低速的无人驾驶。综上所述,无人驾驶汽车的发展到成熟,与高精度地图的发展密不可分,在高精度地图技术成熟时,也将是无人驾驶技术走向成熟的标志,最终能够使无人驾驶汽车投入社会,面向大众。
4 总结与展望
高精度地图是无人驾驶汽车的重要组成部分。从目前来看,只是做了初步的研究,与真正实现无人驾驶还有很大差距。本文认为,要着重与精确度与安全性,使人们能够放心地乘坐无人驾驶汽车;还要考虑到无人驾驶汽车的生产和推广,并制定相应的政策,规范无人驾驶汽车的运作。
参考文献
[1]张曼雯.我国无人驾驶汽车发展现状[J].产业与经济论坛,2018,17(8):18-19.
[2]杨帆.无人驾驶汽车的发展现状和展望[J].上海汽车,2014(3):35-40.
[3]王福章.无人驾驶汽车发展面临的难题及未来展望[J].科技经济导刊,2018,26(14):83.
[4]刘经南,吴杭彬,郭迟,等.高精度道路导航地图的进展与思考[J].中国工程科学,2018,20(2):99-105.
[5]陈颖.浅谈高精度地图在自动驾驶中的应用[C].卫星导航定位与北斗系统应用2017——深化北斗应用 开创中国导航新局面,2017.
收稿日期:2018-08-21
作者简介:曾之泰(2001-),男,河北廊坊人,固安县第一中学学生,研究方向:电子信息。





