无人机驾驶飞机(Unmanned Aerial Vehicle,UAV),简称无人机,目前主要分为多旋翼无人机、固定翼无人机和无人飞艇三类飞行平台。与传统的载人飞机摄影测量相比,无人机有机动灵活、低空飞行、快速获取数字高分辨率影像、操作维护简便、飞行系统成本低等技术优势,通过专业的航摄内业软件一体化处理后,能快速获得4D产品,目前已经广泛服务于城市管理、应急保障、国情监测、土地规划等多个领域。本文从实际生产案例出发,分析和探讨了纵横大鹏CW10垂直起降固定翼无人机(以下简称“CW10无人机”)在1:1000大比例尺地形图生产的可行性,并探讨了无人机航摄一体化成图的质量控制措施。
1 CW10无人机航摄系统简介
CW10无人机航摄系统采用复合翼形式,以常规固定翼飞行器为基础,增加多轴动力单元,在起降及低速状态下按照多轴模式飞行,通过多个螺旋桨产生的拉力克服重力和气动阻力进行飞行;而在高速状态下,按照固定翼模式飞行,通过气动升力克服重力,通过拉力向前的螺旋桨克服气动阻力实现飞行。
主要技术参数如下:飞行总重:12kg;任务载荷:1~2kg;巡航速度:20m/s;最大续航时间:1.5h;起降方式:四旋翼垂直起降;动力系统:40A+10A锂电池;最大翼展:2.6米;抗风能力:5级;搭载相机:sony R7Ⅱ数码相机,影像幅面7952×5304像素,飞行前检校焦距f为35mm,像元大小为4.51μm。
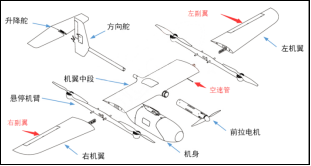
图1 纵横大鹏CW-10装配外观
2 航摄技术设计
2.1 测区概况
测区位于某经济合作区西部,面积约为10km2,平均海拔约为10m,最高约为35m,最低约5m,地势平坦,空域状况良好。测区处于亚热带季风气候区,主要风向为西南风,常年平均风力为3~4级,风向较为稳定,风向风力满足无人机正常起降要求。航线根据测区分布,沿东西方向布设。
2.2 工艺流程设计
CW10无人机航空摄影测量主要分为准备工作、航摄外业、空中三角测量和一体化成图四个主要流程,如图2所示。
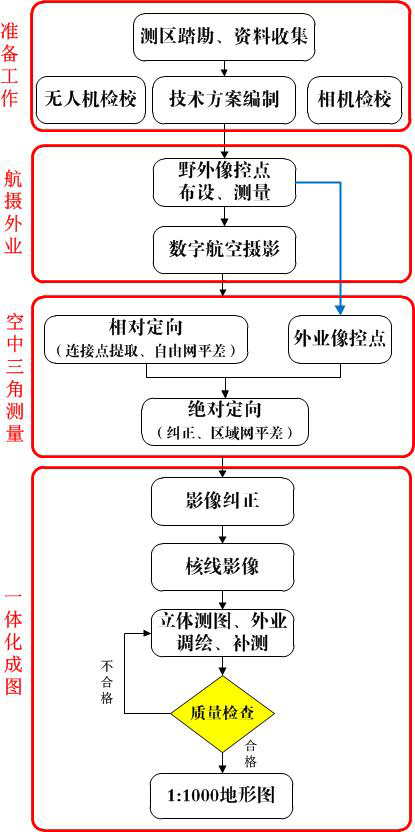
图2 CW10无人机航摄1:1000地形图测绘技术流程图
2.3 相机参数设置
相机参数设置包括曝光时间、光圈调节和感光度(ISO)调节,其中像点位移与曝光时间的公式如下:
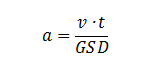
式中,a为像点位移,一般要保证像点位移不能超过1/3个像素;v为无人机飞行速度,单位为m/s;t为曝光时间,单位为s;GSD为地面分辨率,单位为m。
通过调整光圈值来控制光线透过镜头的进光量大小。在快门不变的情况下,光圈(用F表示)越小,进光量越多,画面比较亮;光圈越大,画面比较暗,在正午前后航摄,光圈一般设置为:11.0≥F≥8.0。
通过调整感光度来调节数码相片的亮度,但过高的感光度容易增加像片噪点。正午前后感光度(ISO)设置为250。
2.4 航高设计
根据规范要求,1:1000比例尺地形图生产,正射影响地面分辨率最小为0.1m,航高根据以下公式确定:
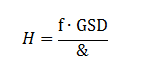
式中,H为航高,单位为m;f为相机焦距,单位为mm;&为相机像元尺寸(像素大小),单位为μm;GSD为地面分辨率,单位为m。
2.5 航摄因子/参数计算
本项目航摄因子/参数计算表见表1。
表1 航摄因子/参数计算表
| 航摄因子/参数 | 代码/单位 | 数值 | 备注 |
| 航摄分区 | 东西长a(km) | 约4.28 | 沿东西方向布设航向 |
| 南北宽b(km) | 约2.40 | ||
| 飞行速度 | S(m) | 20 |
|
| 航向重叠率 | px | 80% |
|
| 旁向重叠率 | qy | 70% |
|
| 地面分辨率 | GSD(m) | 0.1 |
|
| 像素 | Lx | 5304 |
|
| Ly | 7952 |
| |
| 成图比例尺 | M | 0.736111111 |
|
| 摄影基线(拍照间距) | Bx(m) | 106.08 | Bx=Lx×(1-px)×GSD |
| 旁向间距 | Dy(m) | 238.56 | Dy=Ly×(1-qy)×GSD |
| 每条航线像片数 | Si(张) | 42 | Si=INT(a/Bx+1)+1 |
| 分区航线条数 | h(条) | 10 | h=b/Dy |
| 分区相片总数 | S(张) | 420 | S=Si×h |
| 进入/飞出航线转弯距 | D(m) | 400 |
|
| 单航线航线飞行时间 | ti(分钟) | 4.23 | ti=(a+D×2)×S |
| 任务航线飞行总时间 | T(分钟) | 42.3 | T=t×h |
| 其他飞行时间 | t(分钟) | 10 | 起飞、回收总时间 |
从表1可得,将航摄任务区划定为一个航摄分区,分区内总飞行时间约为52分钟,满足CW10无人机单次飞行续航要求(最大续航时间:1.5h)。下图为航摄分区航线布设图。
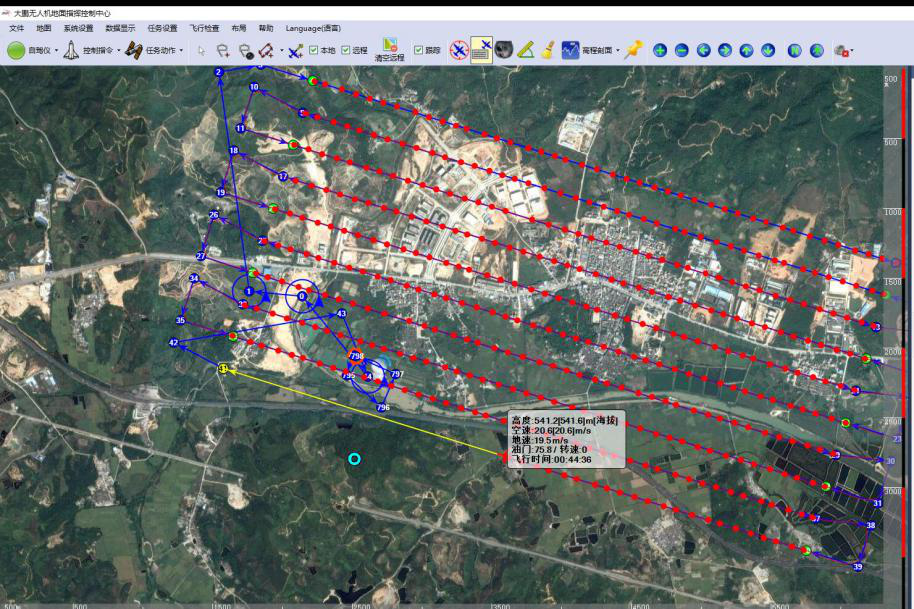
图3 航摄分区航线布设图
3 航摄实施
3.1 像控点布设及标刺测量
本项目像控点布设采用全野外飞前布控法,航线跨度控制在4~6条、控制点间基线数控制在6~7条,高程控制点间基线数控制在6~10条。控制点尽量选在上下两条航线六片重叠范围内,使布设的控制点能用于多张像片。控制点标刺首先进行目范围的大致圈定,外业实地对目标位置进行标刺,外业刺点误差和刺孔直径均不得大于0.1mm。内业根据相关地物认真寻找影像同名地物点,经确认无误后,在相片上相应位置上刺出点位,本项目采用GPS RTK定位技术测量像控点。野外像控点尺寸设计如图4所示。
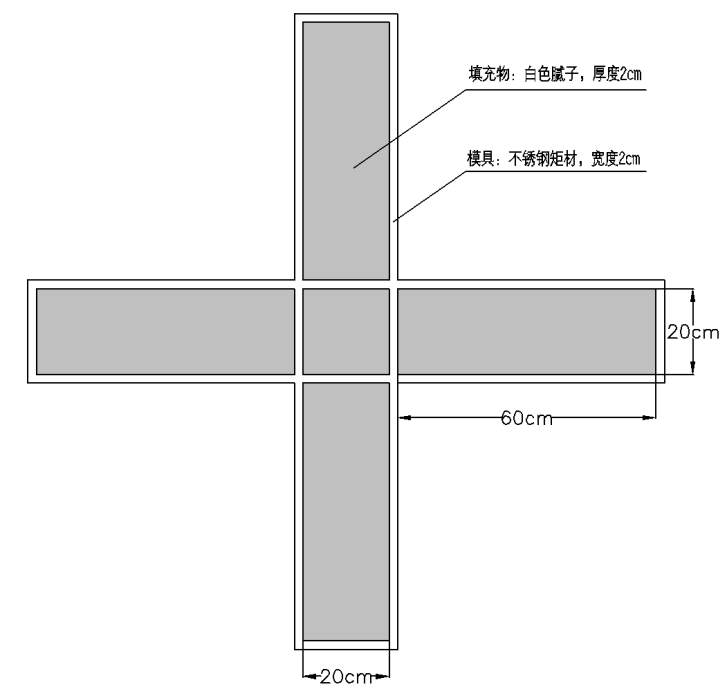
图4 野外像控点设计图
3.2 数字航空摄影
CW10无人机具有垂直起降固定翼的特点,对起降场地要求较低,一般在35m×35m的平整、空旷场地即可完成起降动作,应用GCS-202地面站和数传系统,可全程利用CWCommander地面站软件对无人机进行控制。CW10无人机数字航空摄影的操作流程如图5所示。
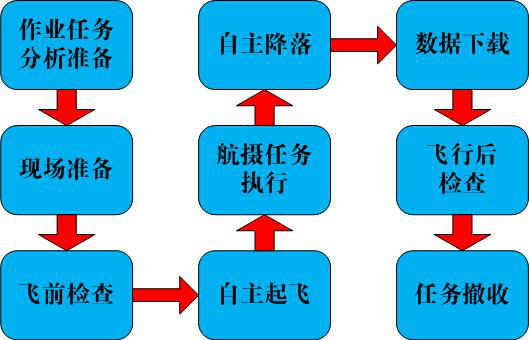
图5 CW10无人机航空摄影操作流程图
4 一体化成图
4.1 空中三角测量
空中三角测量采用武汉航天远景研发的DATMatrix数码新空三软件进行定向建模、空三加密,并采用PAT-B光束法进行区域网优化平差。为保证DATMatrix空三加密精度满足规范要求,在进行航带连接时,应保证航向和旁向像片上都应有连接点。在进行绝对定向时,首先选取测区四角像控点进行平差验算,然后逐渐向测区内添加控制点进行加密平差。
4.2 核线影像生成与影像匹配
将DATMatrix数码新空三加密成果导入MapMatrix软件中,通过恢复立体像对,自动生成核线影像,然后选取立体像对文件进行影像匹配处理,在此基础上,就可以利用MapMatrix软件及测图平台系统进行1:1000立体测图生产。
4.3 外业调绘和补测
4.3.1 外业调绘底图的制作
为保证外业调绘和补测的精度,外业调绘前,首先利用MapMatrix软件在影像匹配后自动生成数字高程模型(DEM),通过数字微分纠正的方法,进行影像匀光匀色处理,DOM纠正、色调均衡处理及镶嵌生成垂直投影的正射影像图(DOM),然后通过局部裁剪和分幅,完成外业调绘底图的制作。
(2)像片调绘本项目采用先室内判读、清绘,后野外检核和调查,再室内修改和补充清绘的方法。调绘内容包括测量控制点、水系、居民地及设施、独立地物、交通设施、管线调绘、境界、地貌、植被与土质、地理名称等。
4.4 内业清绘及整饰
对像片上各种明显的、依比例尺表示的地物,对性质、数量进行说明,其位置、形状应以内业立体模型为准,调绘片应分色清绘。清绘整饰的基本内容包括各种属性和注记上图、导入野外全数字采集的新增、补测的地物、屋檐改正、符号化处理及图幅整饰及接边检查。
5 质量控制
5.1 航线设计质量控制
航线质量控制是指在对相机参数设置、航高设计和航摄因子计算完成后,对设计好的航线进行检查。首先对曝光点坐标、重叠度、基线长度、航线条数、及像片总数量、航摄时间等进行严格检查,其次,根据任务区地形高差判断航摄分区和摄影基面是否合理,同时根据已有影像检查像主点是否落水。
5.2 飞行质量控制
比起传统的载人大飞机航摄,CW10无人机因飞行载荷较轻,翼展较短,在执行航空摄影时,极易受到气流和风力的影响,飞行姿态不稳定导致像片倾角过大、航线弯曲度和像片比例尺不一致等现象,因此,起飞前必须设计合理的航高,选取最适宜的天气和时间进行航摄,在成本控制合理的情况下,尽量设计较大的航向和旁向重叠度。为提高航测内业高程数据釆集的精度,在安装数码相机时,可将相机的阵面的长边平行于航线方向放置。
5.3 空三加密质量控制
在使用DATMatrix进行空三加密建立连接点时,选取像控点应由外而内逐渐增选控制点进行平差结算,分批次进行平差解算合格后再进行加密。在利用PAT-B进行平差后剔除粗差点时,应按照由大到小的原则,依次剔除粗差点,按照这样的平差流程可提高平差精度。
5.4 影像畸变差去除
CW10无人机航摄影像畸差主要是由于数码相机造成的系统畸变,另外航摄时的光线和姿态也会产生畸变差,去除畸变差有利于提高地形图的高程精度,常用的方法是在飞行前一天对相机进行检校,以获取准确的畸变参数,然后利用MapMtrix软件通过对原始影像进行几何校正和辐射校正从而去除畸变差。数码相机检校可在飞前和飞后进行,但是实际生产中,由于飞机降落震荡及飞后数码相机的运输条件不可控,推荐飞前检校。
6 结语
近几年,由于多旋翼无人机不受场地限制、可悬停、成本低等优点的影响,其型号及数量迅猛增长,但是受制于动力、气动布局等因素,多旋翼在航程、速度、飞行时间等方面难以满足越来越严苛的用户需求。虽然纯固定翼无人机续航时间长、速度高,但却需要起飞跑道,降落伞故障等大大制约了其可用性。本文基于CW10无人机的垂直起降固定翼技术优势,结合某经济合作区1:1000地形图生产实践,介绍了垂直起降固定翼无人机低空数字航空摄影的生产工艺流程,同时,简要论述了实际应用过程中的质量控制方法,对于起降场地条件较差的山地丘陵及建筑密集的中小区域1:1000比例尺地形图生产具有一定的参考意义。
参考文献
[1]张丹,卢小平.基于全数字摄影测量系统MapMatrix的DOM制作探讨[J].数字技术与应用,2015,(2).
[2]杨润书,马燕燕,殷海舟.低空无人机航摄系统地面分辨率与航高的关系研究[J].地矿测绘,2013,29(3).
[3]陈姣.无人机航摄系统测绘大比例尺地形图应用研究[D].昆明:昆明理工大学,2013.
[4]GB/T 15967-2008 1:500 1:1000 1:2000地形图航空摄影测量数字化测图规范[S].
[5]何敬,李永树,鲁恒,等.无人机影像的质量评定及几何处理研究[J].测绘通报,2010,(4).
(作者系深圳市工勘岩土集团有限公司注册测绘师)





