1 ETC天线技术与相控阵技术原理
1.1 ETC天线技术现状及存在问题
当前,ETC(不停车收费系统)天线的通讯区域是6.5m×3.0m,完整地涉及邻道干扰、通车速度以及交易成功率,但是ETC天线通讯区域中心位置与边缘位置具有很大的环境差异,主要表现在信号、载噪比以及信噪比三个方面。具体来说,通讯区域边缘的信号、载噪比以及信噪比都要比中心位置差,如果目标车辆的车头不是位于中心位置,而是位于区域边缘,此时就会出现误码的现象。
一般情况下,当车辆的通车速度达到40km/h以上时,相关程序仍在进行,但是车头已经处于信号弱、载噪比差的边缘通讯区域内,误码率超过1.0E-4,从而大大降低了交易成功率。而如果加大通讯区域的长度,使之达到7.5m以上时,虽然能够有效地改善通车速度和交易成功率,但是跟车干扰问题将进一步加深;若通讯区域的长度小于7.5m,通车速度与交易成功率都会得到限制。通讯区域的宽度是否恰当也会带来邻道的干扰问题:如果宽度在3.3m以上,那么该问题就会被深化;而宽度处于3.3m以下,此时需要重点考虑车辆对车道中心的偏离程度,以及电子标签的安装位置。通过上述分析,可以发现6.5m×3.0m是一个较为合理的通讯区域范围。但就目前我国交通通行现状来看,各个道口的通车效率已成为ETC系统中的重要问题。
1.2 相控阵技术原理
相控阵技术主要应用于航空雷达领域,相控阵所涉及的天线阵面上有很多辐射单元和接收单元,单元的数目可以从几个到几百个。该数量与波束在空间形成的方位数量具有正相关关系,即单元的数量越多,形成的方位数量就越多。所以,天线单元的数目对天线的功能具有较直接影响,而一定数量的单元在平面上规则排列着,形成阵列天线。根据电磁波原理,计算机可以控制不同位置的辐射单元,从而实现波束方向的改变以及扫描;相应地,辐射单元将从外界接收到的信号送回至主机,实现主机对目标车辆扫描、跟踪和测量。
ETC系统中所运用的相控阵天线是由多个部分组成的,主要有相控阵接收组件和发射组件、天线子阵构成的发射天线和接收天线、波控接口以及地感接口、通讯控制模块、车辆跟踪模块、车速控制模块、安全认证模块以及电源通讯适配器。各模块各司其职,保证相控阵天线在ETC系统中的高效使用。其中,发射天线和接收天线利用一个环形器,形成两者可共同使用的一个天线阵,发射天线的天线子阵通过馈线网络连接至相控阵发射组件的射频信号处理单元,接收天线的天线子阵同理,而射频信号能够准确地控制天线子阵相位以及幅值,主要通过对单元内部的移相器和衰减器进行赋值而实现的。通讯控制模块主要负责一系列的流程控制,并判断车辆的位置以及车辆速度,利用一定的技术计算,实现车辆的波束跟踪;安全认证模块用于安装安全认证模块PSAM卡;电源通讯适配器主要是用于实现ETC天线与上位机之间的远距离通讯。
2 相控阵技术在ETC天线中的应用测试
2.1 波束扫描范围应用测试
波束扫描范围应用测试用于ETC天线对跟车干扰问题的解决,图1是波束扫描范围应用测试的技术原理依据。通过该应用测试,验证了ETC天线相控阵技术波束跟踪车辆实况,当地感线圈信号发生变化时,波束也随之发生移动。
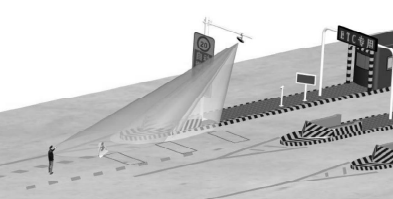
图1 波束扫描范围应用测试
车道工控机天线设备驱动程序具有一个动态库,而车道天线通讯区域扫描控制逻辑就集成于该库之中,车道应用程序无需进行频繁的升级修改。另外,地感线圈发出信号,该信号被相控阵技术接收后,通过发出微波波束将车辆始终锁定在通讯区域的中心位置,利用中心区域信号佳、载噪比以及信噪比良好的环境特点,实现自动跟踪车辆和快速扫描。所以,在技术化和动态化过程中,通车的交易成功率得到大幅度的提升。具体实现原理如图1所示,如果三个地感线圈发出的信号为000时,则表明此时地感线圈未被触发,持有obu的实验者逐渐走进ETC天线,在位于12.5m的距离处,天线波束将会唤醒obu;如果三个地感线圈发出的信号为100时,则表明第一个地感线圈被触发了,这时实验者手持obu逐渐走进ETC天线,结果显示,在8m左右的距离处,obu被天线波束唤醒;如果三个地感线圈发出的信号为010时,此时触发了第二个地标线圈,实验者手持obu逐渐走进ETC天线,在4.5m左右的距离处,obu被天线波束唤醒;在此期间,波束可以根据地感线圈信号的移动迅速做出相应的移动。此外,当无标签的车辆进入ETC天线时,波束也会进行跟踪,此时后方的车辆就被限制进入,当该车辆触发了第三个地感线圈时,将会被系统判定为误闯车,程序结束。
2.2 跟车干扰应用测试
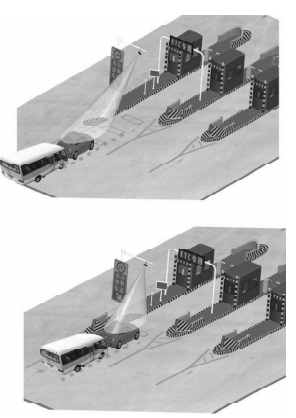
图2 跟车干扰测试应用
跟车干扰测试通过对实际车辆的通行状况进行测试,从而判断相控阵技术解决方案抗跟车干扰的效果。图2显示了跟车干扰的具体测试过程,通过对上述过程的反复操作,得到这样一个结论:相控阵技术解决方案的抗跟车干扰效果比较显著,即使两车之间的距离小于1m,也不会出现跟车干扰的问题。原因有以下几点:
(1)通讯区域静态范围的缩小,有效地解决了跟车干扰和邻道干扰的问题。
(2)相控阵技术实现了通讯区域的动态移动,使得通讯区域能够始终与车辆所压地感线圈保持一致的移动方向和时间;根据车辆进入的先后顺序,首先锁定第一辆车辆,对其展开处理,直到该车辆交易成功,或者第三地感线圈被触发(误闯车)。
(3)第一辆车辆交易结束之后,目标锁定于紧随其后的第二辆车辆。在处理第二辆车辆时,通过对不同地感线圈信号的感应,实现微波波束的重新定位,从而开始下一车辆的处理。
3 ETC天线相控阵技术的优势
3.1 有效解决了邻道干扰问题
通讯区域的范围大小是邻道干扰问题产生的重要原因,相控阵技术对通讯区域的改进与完善,有效地解决了ETC系统中邻道干扰的问题。较传统的ETC天线相比,利用相控阵技术的ETC天线通讯区域表现出更加精准的特点。因为相控阵技术成功地实现了通讯区域的动态化,使得其能够跟随目标车辆前后移动,从而保障车头始终处于通讯区域的最佳位置;另外,车辆的最高通行速度也由于通讯区域的动态化足足提高了一倍,从而提高了车辆的通行效率。根据相关的邻道测试结果可以发现,相控阵技术具有显著的抗邻道干扰效果。
3.2 成功实现了低误码率
误码率产生的最根本原因在于通讯区域边缘的信号偏弱,无法为跟踪、扫描和测量等内容提供良好的环境支持,效率与准确率也无法得到保障。而相控阵技术的运用有效地克服了通讯区域边缘信号偏弱的问题,为相关工作的开展提高了技术支持。相控阵技术通过动态的通讯区域将目标车辆的车头锁定在区域中心位置,而该位置处微波通讯的载噪比C/N始终以高水平的状态呈现出来,根据载噪比C/N越高,误码率越低的原理,相控阵技术实现的通讯区域动态化能够非常有效地降低了通车误码率。
3.3 大大提高了通车速度
邻道干扰问题与误码率问题都是影响通车速度的重要原因,只有解决好了邻道干扰以及高误码率问题,才能从源头上实现车辆通过某个道口的速度。正如上述分析,相控阵技术通过建立动态的通讯区域消除了相关车辆的邻道干扰,并克服了通讯区域边缘信号偏弱的环境问题,从而实现了低邻道干扰以及低误码率的目标,大幅度提高了通车速度。相关资料显示,车辆的通车速度在新ETC天线中达到了100km/h的成果,比前一代ETC天线快了将近1倍。
参考文献
[1]陈艳艳.智能交通信息采集分析及应用[M].北京:人民交通出版社,2012.
[2]黄水金.相控阵技术在ETC天线中的应用探讨[J].数控技术,2015,(7).
[3]胡明春.相控阵雷达收发组件技术[M].北京:国防工业出版社,2014.
[4]靳军,王梅.ETC应用云模式探讨[J].中国交通信息化,2014,(7).
[5]刘东余.降低相控阵技术成本[J].交通科技与经济,2015,(3).
(作者系江苏智运科技发展有限公司工程师)





