1 绪论
1.1 背景
车联网,是物联网的发展核心之一,在2011年的《物联网“十二五”发展规划》中被提及。市场上存在各式各样的车联网解决方案,其中不乏一些好的汽车车联网方案,还有前几年共享单车上应用的各种方案,以及后装市场上五花八门的产品。整个车联网产品线,因为对应着不同的需求,有着不同功能的产品。同时,二轮电动车因具有方便实用等特点发展迅速,一直饱受大众欢迎,市场需求量越来越大。
由于电子化发展迅速,二轮车摩托车与二轮电动车存在非常大的改进升级空间,能够适应当下电子化、数据化的时代,并能够提供更贴心、更安全、更便利的用户体验。
本课题结合二轮摩托车与二轮电动车的特点,借鉴四轮汽车上与共享单车技术,在有着严格成本要求以及丰富多样化的二轮摩托车与二轮电动车产品基础上,实现能够模块化,可低成本,并能够解决现有摩托车上电量低、电动车功能扩展问题的一种二轮车整车控制器模块化平台方案叙述。
1.2 目的
二轮摩托车及二轮电动车车联网主要实现车辆数据主动上传数据功能,并实现通信。其中实现远程定位系统,车辆实时定位并记录和查询。实现车辆防盗,采用了震动唤醒警报,提高被盗可能。另外,对电机控制器与发动机ECU锁定,关键电子部件的ID匹配绑定,使关键器件如发动机、电机控制器等在非正式授权下不能正常工作,从而降低产品的使用价值提高盗窃成本。实现实时故障监控及诊断提醒,通过车载人机交互设备、手机交互、远程客户端等显示查询当前实时故障码以及故障记录。
1.3 意义
本课题的设计与研究,实现了低成本的车联网方案,完成二轮摩托车及二轮电动车数据上云,解决了现在传统二轮摩托车及二轮电动车电子通信技术薄弱环节,解决了二轮车上成本要求严格的问题,实现能够普遍实现车联网的技术方案。
采用模块化设计,满足现有各种层次各种需求的设计要求,能够满足与日俱增的各种模块化设备的积木式创新。以车联网核心模块为基础,实现快速功能定制产品,以及产品的升级迭代,提高产品电子部分的产品生命周期。
实现故障监控与诊断,大大降低了用户维修的成本,使车辆故障第一时间把握信息,第一时间接入维护修理。由于廉价的二轮摩托车及二轮电动车的产品定位,一些车辆保养与维护一直不被重视,往往常年缺乏保养,甚至在偏远山区无法维护。故障监控及诊断功能能更好地反映车辆的情况,提供更详细的提醒,降低用户的忽略及时修复。同时明确故障信息,降低维修门槛,大大节约了人力和物理的消耗。
2 总体方案介绍
2.1 系统结构
由于二轮摩托车及二轮电动车的产品特点,如文献[2]所诉方案,需要独立的STM主控芯片通过串口来带GPS模块和GPRS模块,一些类别的产品并不会用到这么多的资源,将会大大增加不必要的成本。所以,本课题设计采用最小化系统方案,同时采用模块化的设计,不但能实现最低的成本,还能实现可扩展强大的功能。
本课题二轮车整车控制器平台,是以2G/GPS、BDS通信模块为核心。由CAN总线、485总线、K线、蓝牙通信、2G通信等方式,连接了包括整车控制器、动力控制系统、BMS锂电管理系统、ABS防抱死系统、智能仪表组件、通信模块、组合控制手把、前灯控总成、后灯控总成、激光检测模块,以及其他功能模块等,如图1所示。
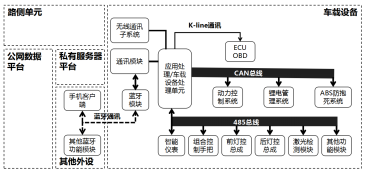
图1
2.2 车内总线
车内总线通信根据实际的需求,模块化的采用CAN总线、485总线、K-line。CAN总线适用ISO17565标准。其中不少2路,其通信接口是独立隔离的,通信速率≤1Mbps,可配置终端电阻(62Ω+62Ω)具有ESD,EMI,EFT防护能力,具备CAN激活功能,电池保护功能,电机保护功能,电池能量管理等。K-line通信是以ISO14230定义的KWP2000的物理层、数据链路层、应用层为基础,具备ESD保护,速率≤10400bps,可通过K-line接口实施读取故障码,数据刷写,读取OBD2数据流参数等。
2.2.1 CAN总线
采用短数据帧,CAN节点在错误严重情况下具有自动关闭输出功能,因为其自身的特点CAN收发模块具有抗车辆环境下的瞬间干扰、保护总线、可靠性高等能力,从单片机输出的CAN数据信号先经过告诉光耦进行隔离,将外部CAN网络的干扰信号隔离,并保证数据能够稳定发送和接收。本课题并没有采用现有汽车上常用的AUTOSAR开发,而是自己定义简单的通信协议,通过数据加密的处理,确保数据安全可靠,其中关键部件采用了双总线的设计方式。连接着等级要求高,动力系统、锂电系统、ABS系统等关键部位。
2.2.2 RS485
总线易与TTL电路对接,且不易损坏电路的接口芯片。其优势在于成本较低,复合二轮车产品的设计要求。尤其在一些廉价部件电子化后作为的新节点,能有力推动整体车辆的电子化和数字化。为了保证其通信可靠安全,采用统一的硬件接口标准协议、软件接口标准协议,使硬件线路更加单一,设计更加方便,更有利于功能节点模块的开发和利用。在软件上直接使用,也降低了日后功能模块开发的开发难度,节约时间成本。采用标准化设计是模块化设计的前提。
2.2.3 K-line
实现起来更加容易,逻辑电平的改变,只是需要转换电路即可,是半双工穿行通信。本课题采用集成电路方案,作为兼容老款ECU的通信方式,不但能实现OBD2的故障监控及数据流读取功能,还能实现对ECU的锁定防盗功能。本文采取快速初始化方案进行激活,读取OBD故障码,并根据需求读取指定的转速数据、车速数据、档位位置、进气温度、冷却液温度、大气压力等作为副仪表功能及其他功能所用。
2.3 系统基本功能要求
本整车控制器平台的时间日期精确到秒。数据采集频次不低于1次/秒。其中存储介质满足7天以上的数据存储,当内部存储介质存储满的时候,可以自定循环覆盖。当通信异常时,控制器终端采取到的实时数据将会保存到本地存储介质中,等到通信回复后进行实时数据的补发。并且本控制器携带备用电源,在外部供电异常断开的时候,仍能独立运行,并且保障能够把断电前的10分钟的数据上传的到系统服务器。最后本整车控制器的程序能够实现在线升级程序,确保软件的安全可靠。故障3级时,蓄电池单体电压和各个电池包探针温度的能力,确保数据完备。
2.4 应用处理单元
当平台需要拓展功能,根据其产品个性的需求,针对是否需要配置相应的总线以及相应的应用功能。采用如文献[7]中提到控制方案“混合式控制方案”。其中在本课题中,各子模块将处理该子模块本身的简单基本功能,车载设备处理单元作为主机处理485总线和Kline总线等相关功能,同时也当作应用处理单元,实现复合功能而形成的复杂性功能。
3 定位通信模块
3.1 模块介绍
对于通信模块的选用有多种方案,有分开也有集成,品牌也各式各样。其中比较熟悉的有合宙、SIMCOM、移远、SIMPLE、和芯星通、UBOX、SKYLAB等。大多都是MTK2503或者RDA的芯片方案。通过对比测试,并结合二轮摩托车及二轮电动车的产品特点,最终选择了目前比较前沿的合宙通信模块AIR800。23.8mm×14.8mm×2.3mm超小的尺寸,并内置32Mb Nor Flash+32Mb SRAM。采用LCC封装,并且模块内部已经集成了GPS低噪音放大器,使得外围布局更加简洁方便;具备了丰富的外围接口,支持UART、SPI、I2C等多种接口,还支持ADC、语音的输入和输出。
AIR800模块是一款GPRS+GPS二合一的模块,由RDA8955 2G通信芯片和国科的定位芯片组合而成。在RDA8955基础上能够支持二次开发编程,支持C语言编程,并内置了LUA虚拟机,能够实现LUA脚本编程开发。国科的定位芯片可以定制GPS、北斗、GLONASS中组合定位方式。同时该模块也支持千寻定位服务,能实现高精度的定位服务。
3.2 Luat软件架构
Luat是Lua+AT的缩写,它是上海合宙通信科技有限公司推出的物联网开源架构,依托于通信模块可做快捷的开发。Laut软件架构支持多平台、多制式、多型号,可以C,可以Lua,也可以AT,开发简单快捷稳定,非常适合独立开发的开源平台。分为底层软件和上层Lua脚本两个部分,见文献[9]。
其中通过底层软件,利用虚拟串口发送AT指令到底层core软件,并提供了许多基本的功能库脚本文件,包括AGPS秒定位、网络管理、电源管理、数据链路管理、基站经纬度查询、SIM卡管理等基本库,还有一些http、mqtt等协议的封包库文件。在此基础上能够简单的通过脚本编辑调用,根据产品的特有功能和结合用户体验来实现车联网。
3.3 定位效果调试与测试
在完成项目后进行了行车测试。对于不同的模块,进行了动态精度的测试,静态跳变动态的测试,有遮挡物的弱卫星信号追踪测试,有强多径效应的测试,天桥底测试,弱信号环境捕获能力测试等。
由于二轮摩托车本身电量储备比较缺乏,在电源管理方面的设计做到了极致。其中要求定位模块在车辆关闭时是关闭的。同时,为了得到更好的用户体验,在尽可能短的时间内完成有效真实的定位,为GPS接收机提供每颗卫星的位置随时间变化的信息,即星历。并根据用户使用的习惯选择保存适合大小的数据。在选择卫星时候尽可能选择角间距较大的卫星,同时避免低仰角卫星带来的干扰等。同时,加入LBS基站定位辅助功能,以确保车辆能够显示真实有效的定位信息。图2是测试结果以及服务器数据显示。
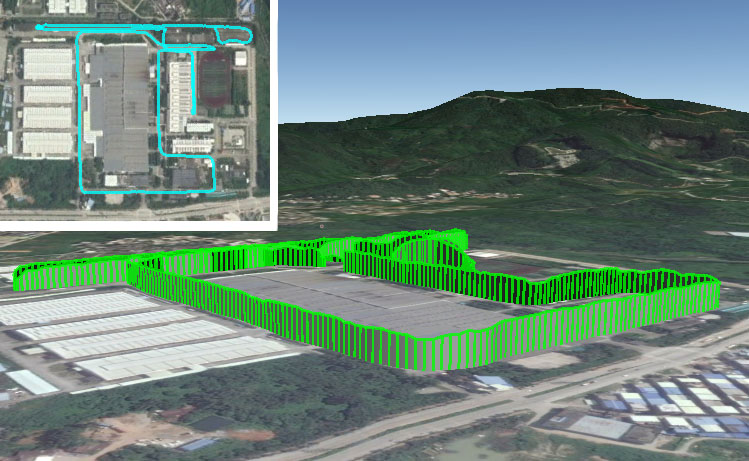
图2
4 结语
本文主要对二轮摩托车及二轮电动车实现车联网的模块化平台的方案进行描述,整合了现有科技技术发展的成果,解决了廉价二轮车的车联网工程问题。采用可独立使用及编程的通信模块方案,实现低成本的车辆定位功能,促使普遍二轮车都能采用车联网功能。设计RS485总线采用模块化设计的思维,对硬件接口及软件接口的标准化,使拓展功能更加方便可靠。直接内置K-LINE的OBD协议应用,读取车辆故障代码及数据流更方便,能在第一时间告诉用户故障最新信息,也能读取用户所关心的数据流参数,使用户使用更加便利安全。采用前装模块化的设计,避免后装市场造成不必要的车辆损坏或不确定性隐患。
参考文献
[1]张琦.基于车联网的汽车发动机远程故障诊断系统的研究[D].长沙:中南林业科技大学,2017.
[2]乔国鹏.基于STM32与AM1705的车载实时监控系统设计[D].成都:成都理工大学,2012.
[3]草万科.CAN协议车载网络若干关键理论研究[D].哈尔滨:东北大学,2008.
[4]李川.纯电动汽车整车控制器的设计[D].天津:天津大学,2016.
[5]高金转.总线式数据采集系统的设计与实现[D].太原:中北大学,2017.
[6]何丽华.汽车总线系统开发测试平台的研究[D].广州:华南理工大学,2010.
[7]刘航.新能源纯电动汽车整车控制器硬件研究[D].镇江:江苏大学,2009.
[8]Luat开源社区[EB/OL].wiki.openluat.com,2018.
[9]李海玲.基于北斗定位的物流监测系统的设计与实现[J].科技视界,2018,(1).
[10]刘有贵.GPS/GPRS车辆定位网络系统及故障在线检测技术研究[D].长春:长春理工大学,2011.
收稿日期:2018-04-12
作者简介:林智能(1988-),男,广东人,五羊-本田摩托(广州)有限公司助理工程师,在职硕士研究生,研究方向:机电一体化。





