1 概述
随着车辆、飞机和其他驾驶行业业务的发展,未来的驾驶舱和驾驶员培训都需要一个高效、准确的人机交互系统。在真实驾驶模拟器的座舱中,传统的人机交互的输入和显示方式依赖于机械按钮和电子屏幕。在未来的人员培训中,模拟驾驶舱需要提供高效、灵活、高安全性和可靠性的人机界面系统。例如在飞行员培训中,现在的战斗机驾驶员需要同时进行多任务操作和决策,如对未知飞机的监视、对战场形势的观察、瞄准目标、接受后方指令等。在执行许多操作任务时,驾驶员还必须执行仪表盘操作、地面通信和其他任务。未来的战斗机不仅要满足当前空中多任务作战的需要,也要满足未来广域态势感知、现场数据采集处理、高效决策等空战需求。所以,想要在人员培训中达到真正的人机一体化目标,需要高效的训练系统作为保障。
虚拟现实技术综合了计算机图形技术、计算机仿真技术、传感器技术、显示技术等多种科学技术,在多维信息空间上创建一个虚拟信息环境,具有模拟现实环境的强大能力,并有助于启发操作者的构思。利用虚拟现实技术构建模拟器系统,可以极大地节省设备的投资,充分利用建筑空间,提高投入产出比,并且能够提高人员培训的效率。
然而,目前的虚拟现实技术需要佩戴特制的头盔,操作人员带上头盔后,难以感知自身肢体的位置,这就需要辅助的定位方法将自身肢体相对于头盔的位置信息传到虚拟场景当中,从而实现在虚拟场景下人们对现实空间物体的操纵。目前在一些虚拟现实游戏当中,人们大多是采用红外定位的方法,即在空间的不同位置安放不同的红外发射器,手臂和其他肢体上安装红外传感器,传感器接收不同发射器的发射信号,采用几何定位的方法确定自身的位置信息,然后将计算得到的位置信息传送到VR头盔当中。这样,在虚拟现实场景中就出现了我们的肢体位置信息,采集和记录上肢运动信息的装置又叫做“数据手套”。
数据手套是一种高可靠性、高交互性、高效率的人机界面信息记录平台,为采集和记录驾驶员训练数据提供了一个通用的便携式环境。拥有人机交互数据手套的VR人机界面系统有很多应用,不同的应用决定了人机交互系统的总体结构设计。本文列出了以下3个方面,但不限于它们:
(1)记录驾驶员在整个驾驶过程中的动作。在训练过程中和训练结束后,通过数据手套系统对驾驶员的操纵数据进行采集和分析,为制定进一步的训练计划和保存大量操作证据提供重要信息。数据手套中的集成传感器系统记录驾驶员在操纵过程中的各个状态,通过数据手套和VR系统之间的数据接口获取模拟机和驾驶员的状态数据。作为一种便携式交互设备,数据手套可以带进实验室进行数据分析,这将使综合培训报告更准确。
(2)手势识别等新的输入方法。数据手套可以跟踪手部动作,并将数据发回计算机快速分析驾驶员的手势,将手势翻译成指令信息。驾驶员可以用数据手套做简单的手势来进行人机交互,而不是烦琐复杂的输入指令和通信信息。在手势的同时,驾驶员的注意力仍然可以集中在训练环境中,这大大减少了驾驶员的反应时间。
(3)虚拟现实视觉交互工具。驾驶显示系统不仅从机械仪器发展到大触摸屏显示系统,未来还将向VR方向发展。数据手套将为增强现实和虚拟现实显示系统带来重要的功能,使显示系统更具可控制性和可配置性,带来更大的发展空间。驾驶员将通过数据手套控制虚拟图像,根据驾驶员的需要显示VR信息。与此同时,这些操作不会影响驾驶员的视觉切换,他们的视野仍然集中在驾驶的场景中。
2 典型的数据手套解决方案分析
为了达到上述目标,准确、可靠的手指和手掌定位是非常必要的。用于运动跟踪的最常用传感器可以概括为弯曲传感器、红外传感器和磁传感器等几种基本类型。
(1)弯曲传感器。这种定传感器采用了一种应力电阻材料,传感器覆盖在指关节上,其电阻率随传感器的弯曲程度而变化,从而产生变化的电信号。
(2)红外传感器。红外发射机一般用于将定位信号发送到传输介质的另一端,如柔性管或光纤,然后在介质的另一端放置一个光电池传感器来测量信号的强度变化。
(3)磁传感器。这种传感器可能是磁阻传感器或线圈,它可以感应磁场的大小并产生不同的电压变化,通过计算磁场大小可以确定其相对于源的方向和位置,磁场可以是由环境中的源或金属物体产生的。
对于弯曲传感器方法,当驾驶员戴上数据手套时,手指关节的弯曲和拉伸经常发生,这降低了传感器的测量精度和寿命;对于红外传感器方法,为了达到较高的测量精度,需要在数据手套上安装太多的传感器,这大大增加了数据手套系统的复杂性,降低了数据手套系统的可移植性。而本文基于磁传感器的测量原理,提出了一种采用磁感应技术的高精度数据手套定位系统。
手套的手指和手掌上只有几个传感器,但足够测量驾驶员的每只手的一般运动。传统的电磁跟踪算法通过对环境噪声敏感的旋转变换矩阵直接计算欧拉角。磁场的微小扰动会引起欧拉角计算结果的较大变化。为了避免飞机驾驶舱中金属物体的干扰,我们在原有算法的基础上进行了改进。将传感器引入的磁场强度信号进行分离计算,得到坐标的绝对值。空间三维坐标符号可以用矢量内积法确定。最后,通过坐标的逆运算得到欧拉角。实验结果表明,该方法具有较高的定位精度。此外,通过提高采样率,采用卡尔曼滤波等方法可以使位置计算精度的结果达到毫米级。至于手指的定位,在手指的指尖位置安装有10个磁传感器。为了避免相互干扰,可以采用频分法设计数据手套的原型,另外频率划分技术也可以减少飞机舱内金属物体的干扰,提高系统的可靠性。
3 基于磁定位的人机交互系统架构
针对驾驶舱人机界面系统定位精度高、可靠性高的要求,提出了一种磁定位数据手套。相应的磁传感器布置在手套背面和指尖上,形成一套可穿戴的3D输入设备。系统架构如图1所示。
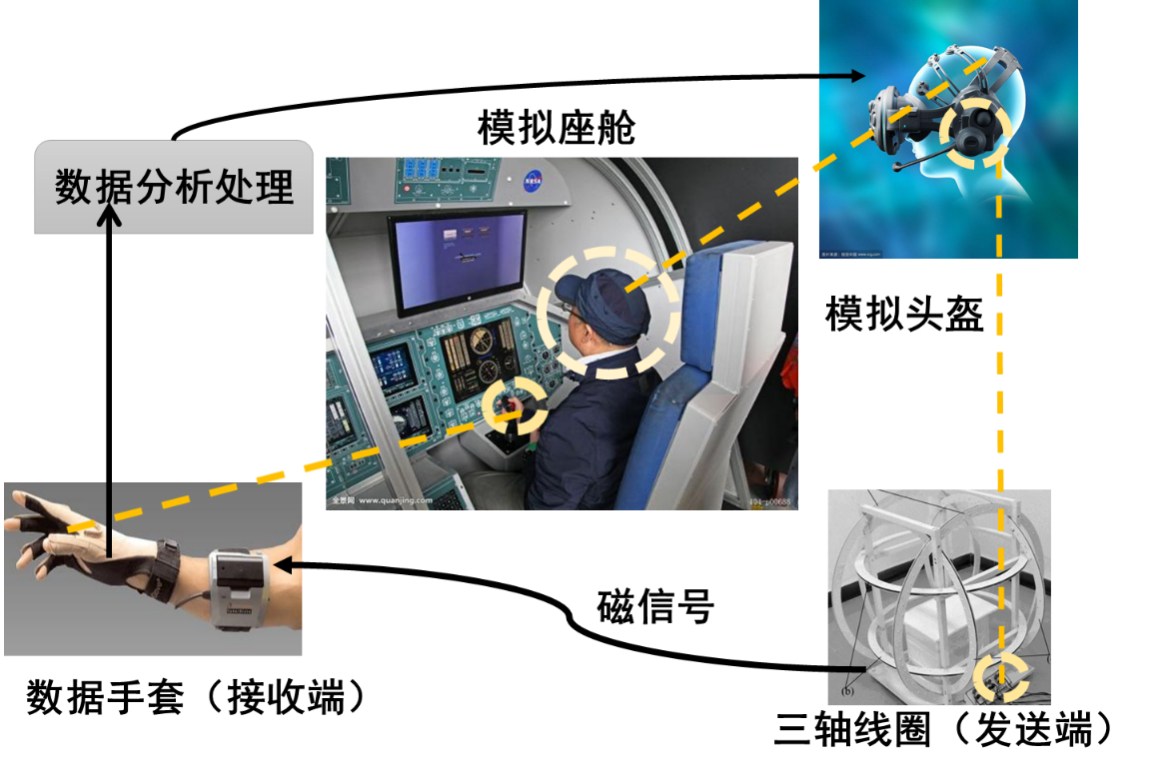
图1 基于磁定位的人机交互系统架构图
整个原型系统分为硬件和软件两部分。硬件包括发射机、接收机、一套带线圈传感器的手套、用于数据采集和处理的电路。软件部分包括带有人机界面的主机和机舱内的数据分析程序。发射机由一组可产生电磁场的可变线圈组成。接收机还包括电磁感应线圈传感器。通过它们,接收器可以检测到发射机产生的电磁场和信息的变化,并根据发射和接收信号的耦合关系确定被测物体的方位和位置。如图1所示,安装在手上的传感器采用三轴线圈,可以保证手掌和指尖的定位距离和精度。发射机线圈的电流大小由发射机驱动电路控制。模拟信号到数字信号的转换在模拟信号到数字转换器中完成,然后数字信号处理器(DSP)中的自动数据处理程序将数字信号转换为传感器相对于发射机的位置数据,并将其传输到主机计算机,将在下一节中详细介绍电磁定位算法。此外,数据手套可以安装9轴传感器,如BMC055传感器。配合使用惯性器件和联邦滤波算法可以进一步提高定位精度。
人机交互系统的关键技术包括高精度磁定位技术、磁场数据的获取和处理方法以及满足驾驶舱要求的计算机软件,其数据手套的应用场景如图2所示。
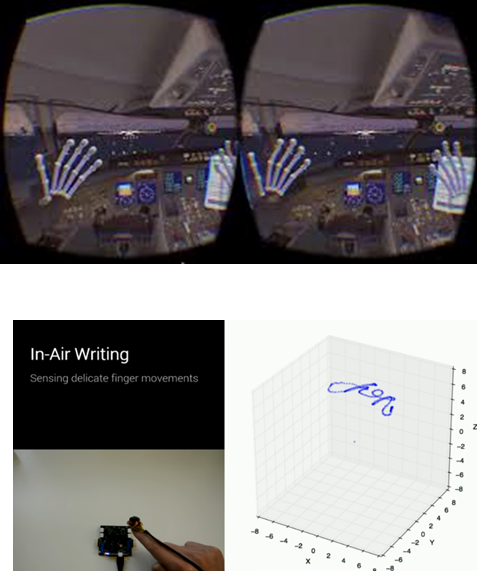
图2 数据手套的应用场景
(1)高精度磁定位技术。在高精度定位系统上采用磁通门技术测量恒定和低频弱磁场。与其他磁测量传感器相比,基于磁通门原理的传感器具有较高的测量灵敏度和较好的稳定性。适用于高精度测量磁场,在航空、航天、航海、地质勘探等领域有着广泛的应用。但是磁通门传感器的尺寸比较大,所以在应用指尖定位时也需要磁阻传感器作为补充。
(2)磁场数据的采集和处理方法。数据采集部分主要使用高精度AD模块进行模拟数字转换的磁信号测量的磁通门传感器和达到最佳的磁场信号的集合。数据处理部分主要包括硬件电路和嵌入式控制系统设计两部分。作为磁通门磁场测量的重要组成部分,电路参数的设计直接影响测量的准确性、及时性和稳定性。
(3)满足驾驶舱要求的主机计算机软件。主机计算机软件需要接收由DSP计算的传感器在空间中的位置信息,并实时显示定位信息。此外,系统的相关参数可以通过主机的软件进行配置。为了便于二次开发,主机计算机软件还可以提供与系统硬件电路相关的接口。主机的软件界面需要配套的应用程序,实时满足定位和手势识别的基本要求。
4 基于磁耦合的电磁定位算法
高精度数据手套定位系统采用基于电磁耦合的磁感应定位算法技术。磁场的传输实际上是基于发射机和接收机线圈之间的电磁感应。数据手套系统使用的是超低频信号,其波长要比发射器和接收器之间的距离大得多。此外,磁场发射源和接收传感器的尺寸要比它们之间的距离小得多。因此,用于各轴定位的磁场模型可以等效于磁偶极模型。在电磁定位算法中,接收机的电流强度和相位与接收机与发射机之间的距离和角度有关。通过电磁计算,可以得到接收机对发射机的距离和角度。建立如图3所示的坐标系。
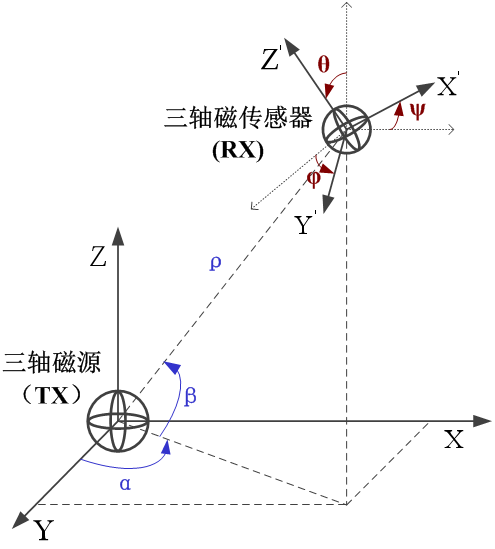
图3 发射与接收端的相互位置关系
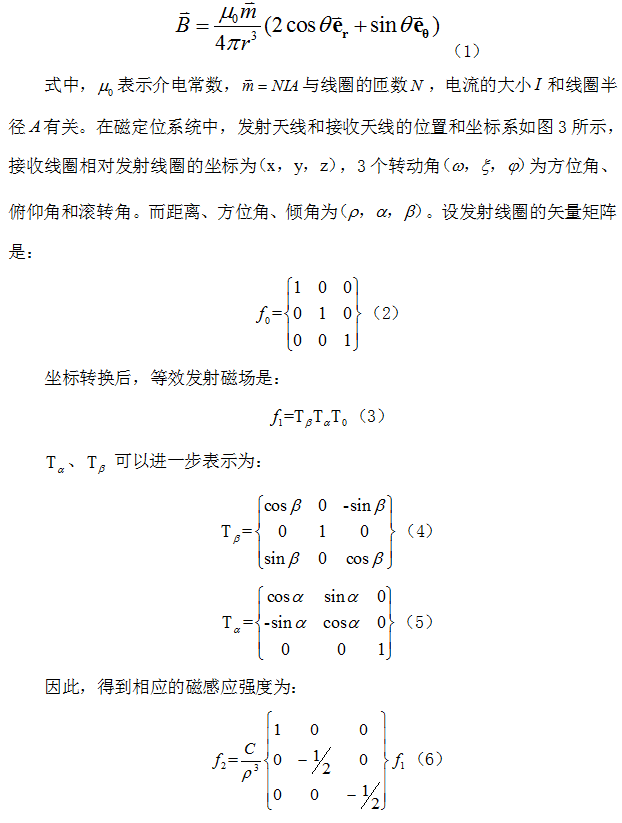
根据磁偶极子模型,磁传感器所接收到的磁源的磁场强度可以表示为:

5 仿真与分析
仿真和实验结果仿真的目的是测试数据手套系统的准确性。仿真参数见表1。
表1 主要的仿真参数
| 仿真参数 | 数值 |
| 载波频率 | 20kHz |
| 采样频率 | 1MHz |
| 定位数据刷新频率 | 125Hz |
| 脉冲占空比 | 1/4 |
不同信噪比下的定位误差如图4所示。如图所示,很明显,传统的电磁跟踪方案在距离定位上具有较高的精度,但在角度的确定上存在着一定的定位误差。
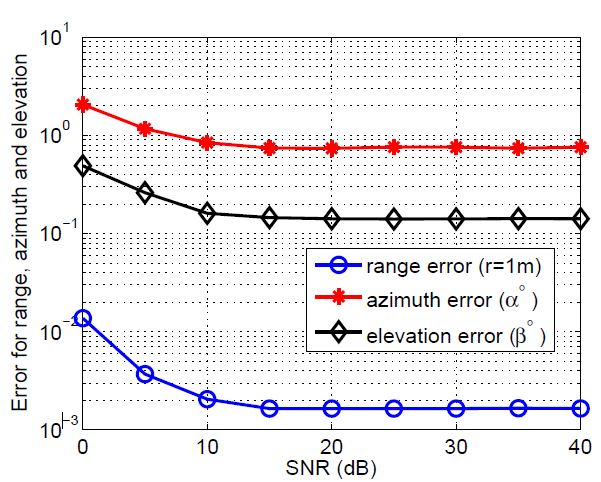
图4 定位误差随信噪比的变化仿真曲线
在定位算法的仿真验证中,发射机在不同的时间分别发送3个正弦信号。每个正弦信号持续2ms。传感器各轴上的接收信号显示在示波器中。接收信号的幅值和相位信息可以通过调节电路得到。在定位算法预装定和校正系统的参数信息,可以更加精确地计算获得发射机与接收机之间的距离和角度,。本文提出的定位方法利用高精度距离定位的结果,可以通过解模糊度来直接确定指尖的空间坐标。三维坐标轴下的定位仿真结果如图5所示,在仿真中信号的有效传输距离可达3米,当信噪比约为20dB时,定位结果比较令人满意。特别是,在1m的测量范围内,定位精度可以达到毫米量级,这对于数据手套的应用来说是可以满足目前各类模拟操作系统的控制要求的。
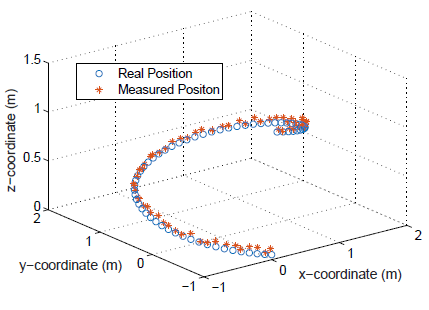
图5 举例仿真三维坐标轴下的定位结果
6 结论
本文提出了一种用于模拟驾驶或训练的高精度人机界面系统,其中数据手套和高精度磁定位算法是人机交互系统的核心。数据手套的手指和手掌上只有几个磁传感器,可以连续实时跟踪细微的运动。传统的定位方法算法不能很好地完成这一任务,因此采用了新的磁定位坐标计算方法,根据实际环境解决了数据手套手指定位的问题。仿真结果表明,该定位算法的精度可以达到毫米级,完全满足普通模拟操作系统的操作需求。
参考文献
[1]H.Xuelin,W.Jiangyun,H.Liang,et al.Situation Awareness Enhancement of Cockpit Synthetic Vision System:Visualization of Tunnel-in-the-Sky[C].International Conference on Electronic Measurementand Instruments,ICEMI’09.9th,Beijing,2009.
[2]T.Hankers,K.Bayram,N. Zimmer,et al.Situation Awareness Through the Integration of Transient Information into Future Cockpit Taxi Guidance[C].Digital Avionics Systems Conference,2011 IEEE/AIAA 30th,Seattle,WA,2011.
[3]A.L.Gorbunov,A.erenzi,G.Terenzi.Pocket-Size Augmented Reality System for Flight Control[C].2015 IEEE Virtual Reality(VR),Arles,2015.
[4]T.Aslandere,D.Dreyer,F.Pankratz.Virtual Hand-Button Interaction in a Generic Virtual Reality Flight Simulator[C].2015 IEEE AerospaceConference,Big Sky,MT,2015.
[5]J.Weissmann,R.Salomon.Gesture Recognition for Virtual Reality Applications Using Data Gloves and Neural Networks[C].Neural Networks,1999.IJCNN’99.International Joint Conference on,Washington,DC,1999.
[6]K.Y.Chen,S.Patel,S. Keller.Tracking Precise Motion of Multiple Fingertips Using Magnetic Sensing[C].In Proc.of CHI16.
[7]K.N.Tarchanidis,J.N.Lygouras.Data Glove with a Force Sensor[J].Information and Measurement Technology,2001(1):380-385.
[8]U.X.Tan,K.C.Veluvolu,W.T.Latt,et al.Estimating Displacement of Periodic Motion With Inertial Sensors[J].IEEE Sensors Journal,2008,8(8):1385-1388.
收稿日期:2018-12-18
作者简介:林静楠(2001-),女,福建莆田人,就读于中国人民大学附属中学,研究方向:计算机。





