0 引言
可重复运载器(Reusable Launch Vehicle,RLV)是一种具有机动、快速、廉价、可靠等诸多优点的航天飞行器。它可以多次往返于地面、空间轨道以及轨道与轨道间,完成快速运输,快速进出空间等多种任务,并能够返回地面的航天飞行器。目前,RLV的整个回收体系基本分为火箭发射,一级、二级火箭分离,一级火箭返回,降落回收,工厂维修,重复利用几个步骤。
根据美国宇航局正在实施的先进运载技术计划,单级入轨(SSTO)火箭的方案有3种,即垂直起降方案、垂直起飞水平降落的翼身组合体方案和垂直起飞水平降落的升力体方案。①垂直起降方案有太空探索技术公司(SpaceX)的猎鹰九号火箭(Falcon 9)一级火箭回收体系,但是这种在运载器底部安装起落架的方式实现最终着陆的方案,在落地时火箭易倾斜,导致起落架无法发挥作用从而降落失败的事故也曾三度发生,因此这种方式对姿态和落点定位等方面的控制要求是十分苛刻的,以至于大大增加了系统的不可靠性。②垂直起飞水平降落的翼身组合体方案有2011年退役的美国的航天飞机和正在研制的XS-1试验性空天飞机等等。这些飞行器都是通过火箭携带或自身垂直起飞然后滑翔返回,水平降落的方式实现回收。但是这种飞行器的设计牵涉到诸多空气动力学的理论导致研发缓慢,虽然安全性和乘坐体验是比较好的,但是经费远超预期,而且最大的问题在于维修费用太贵,甚至足以制造一架新的飞行器,维修难度又太高,操作不当会导致灾难性事故的发生。③最后的升力体方案主要运用在载人航天的返回舱上的,对一级火箭的回收并不适合。由此可见,现存的RLV设计方案大多将目光聚焦在对火箭本身的改进上,有翼或无翼,如何在火箭箭体上加装降落支架等问题,却未能考虑到对地面辅助设施的利用。
本文则着重研究地面支撑系统如何在整个回收体系中发挥更大的作用,从而设计了一种基于回收塔式的可重复利用运载器体系。在上升段运用液体与固体燃料组合使用的传统火箭,再入段的过程中通过火箭的节流阀控制推力大小,用侧喷口调整火箭姿态,运用北斗导航定位和惯性导航的组合导航,通过标准轨道制导和在线轨道制导结合的方式来进行导航制导,计算机实时计算并调整火箭的各种参数,从而达到燃耗最佳并满足终端约束的轨道优化,最后依靠地面回收塔的位置和姿态控制对即将降落的火箭进行位置矫正,姿态修正,并实现最后的减速与稳定停靠,从而有效提高运载器回收级落点的精确性,防止RLV再入阶段最后降落过程受风力和外部干扰等影响姿态的因素而导致降落失败的问题,从而增强整个回收过程的可控性和可靠性以及安全性。
本文具体由以下几个方面组成,第1节提出一种新型的基于回收塔式的可重复利用运载器体系,将导航制导与控制、通信、动力系统和回收系统等相关分系统的关联关系集中于统一框架;第2节重点研究回收塔的系统设计和回收机理,并设计回收塔结构;第3节给出可重复利用运载器的分系统设计,包括轨迹优化设计,导航与控制系统和动力系统;第4节从可重复利用运载器着陆的飞行任务安全和可重复利用运载器自身安全两个角度分别阐述任务和系统安全性;第六部分给出系统综合分析和结论。
1 回收塔式体系结构设计
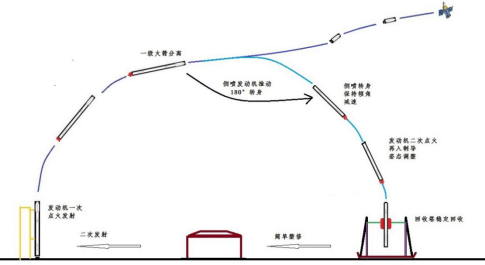
图1 整体发射回收过程剖面图
本文从整个可重复利用运载器体系设计方面进行思考与探究。从第一次起飞到重复利用的二次起飞整个过程可以分为上升段、分离段、再入段、回收段和维修段。
首先,火箭将在我国四个发射场之一或海上点火起飞,整个火箭将采用固体燃料和液体燃料相结合的设计,火箭箭身如传统火箭,分为两级,将实现回收的是火箭的第一级。第一级火箭携带发动机,燃料,小型的控制计算机和诸多传感器,在火箭上升段主要使用较为成熟的固体液体组合燃料推进。
根据卫星轨道的要求在约80千米以上的高度进行一级火箭的分离,并且主发动机会暂时关闭。之后一级火箭依靠惯性还会继续向上滑行一段距离,一般会达到离地100多千米的高度。此时通过火箭箭体上的侧喷发动机对火箭姿态进行调整,旋转180°左右后使箭尾朝下并保持一定的倾角利用空气阻力和气动升力来对火箭进行一部分的减速,然后对主发动机进行二次点火,此阶段将主要使用液体燃料以便通过节流阀对火箭发动机推力进行调整。此阶段采用北斗导航定位和惯性导航的组合导航方案,同时利用箭体自带的运动传感器加上卫星和地面站对其的测控实时获取箭体当前状态数据,通过箭体机载计算机,自主控制系统或者地面测控站组合工作的方式,采用标准轨道制导和在线轨道制导结合的方法计算制导指令,对回收级着陆轨道进行不断优化,通过计算机对发动机推力大小和侧喷火箭的推力调整控制达到优化后轨迹所需的状态量,从而实现回收级的闭环制导控制。
在箭体回收环节,本文着重研究设计的回收塔是一个根据实际需求调整的可移动式海上回收平台或陆地回收平台,通过卫星和雷达对火箭着陆点定位之后,回收平台就可以移动至降落点,在火箭离平台距离较近时,通过回收塔上的视觉传感器,根据火箭位置调整回收塔的位置。两组半圆形的柔性套筒,与火箭上的卡槽进行对接,调整火箭姿态,利用套筒支架末端的液压减速装置对火箭进行最后的减速,完成回收工作。
最后是RLV的维修检测部分,将回收的火箭运往维修厂,对箭体和发动机进行简单的维护保养,经检测安全可靠,然后进行下一次重复发射工作,完成可重复利用运载器的使用周期,缩短火箭发射时间并降低发射成本。
2 回收塔系统
2.1 回收塔结构
为了解决火箭回收的最后降落发生倾倒、速度难以控制等问题,受到火箭发射塔的启发,设计了一种火箭回收塔的立体装置(如图2所示)来更可靠地完成降落回收过程。
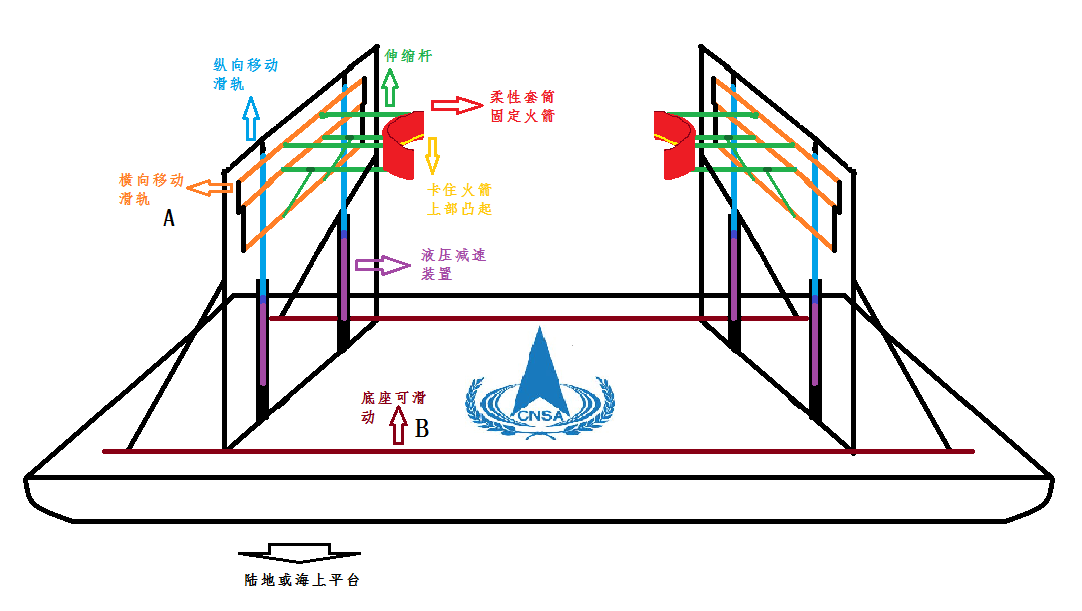 图2 回收塔主体示意图
图2 回收塔主体示意图
回收塔系统是整个基于回收塔式的可重复利用运载器体系设计的核心部分,在整个回收过程中依靠回收塔系统解决前文所述回收落点精度难以保证,回收稳定性不高的问题,为最后着陆阶段提供了更好的安全保证。
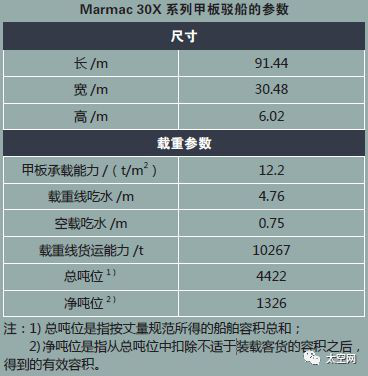
图3 Spacex公司回收平台尺寸信息
整个回收塔分为回收平台和塔身两个部分。回收平台可以基于SpaceX公司的回收平台(如图3所示)加以改进,在长度和宽度上适当增加,而整个平台的承载力需要大幅度提升,可搭载我国最新的舰船稳定设备,增加其稳定性。其任务就是运行至一级火箭再入的着陆点,保持平稳。最关键的部分就是回收塔塔身,塔身分为左右两个对称的结构,从上到下从中间到两边依次为固定火箭用的柔性套筒,连接柔性套筒的伸缩支架,可控制支架移动的横向导轨A,连接着横向导轨用于火箭减速的纵向液压装置,以及可使塔身整体移动,安装在平台上的横向移动导轨B。
2.2 回收过程及机理
①地面监测站和雷达对火箭进行定位,回收平台航行或行驶到预定位置附近。②在火箭离平台距离较近时,通过回收塔顶端安装的光学传感器结合火箭传回的数据对火箭轨迹建模,通过横向导轨B小幅调整回收塔的位置,通过横向导轨A调整柔性套筒位置,与火箭进行对准。③火箭降落到平台正上方时,伸出可伸缩支架并旋转弹性套筒与火箭箭身对齐,然后包覆火箭箭体,顺火箭降落趋势自动与箭体上的卡槽对接,从而对火箭进行移动捕捉。为增强此过程的稳定性,可以加装阻尼、增稳或控制增稳系统来提高火箭的稳定性和平台的稳定性。④若火箭存在微小倾斜则缓慢转动套筒调整至垂直地面方向,最后通过两侧的液压减速装置对火箭进行减速,实现平稳停靠。
鉴于对最后减速的火箭安全性的考虑,一级火箭即使在燃料部分耗尽重量依然能够达到一吨左右,所以在回收塔上将采用为高压大流量所设计的带负载敏感功能的比例阀+变量泵式的液压减速器,可以通过实时压力大小的变化对液压减速器的流量和压力进行调整,最终使火箭平稳落地。通过这种方法,一级火箭得以安全稳定的回收,极大程度上提高了降落的容错率,从而提高了整个体系的安全性和可靠性。
3 导航与制导系统设计
3.1 上升段
上升段的控制主要采取传统火箭的方式。火箭上升段主要使用较为成熟的固体燃料推进,根据在地面测算好的轨迹发射火箭控制指令在达到预设的高度和速度后,计算机会自动启动一级火箭分离程序,完成与二级火箭或卫星分离的任务,并在空中进行一段时间的滑行。计算机在此过程中要利用一级火箭上的多种传感器对火箭的姿态进行实时检测,同时通过侧喷口进行第一阶段的火箭姿态调整,使火箭俯仰角进行近乎180°的改变,从而进入再入阶段。
3.2 再入段导航制导与控制
再入段的导航制导与控制是整个过程中最为关键的一部分,直接关系到RLV是否能够回收成功。首先,一级火箭上,要配备许多高精度的传感器(如加速计、陀螺仪、地磁传感器,机器视觉传感器,温度传感器)和自动驾驶仪、高度与速度控制系统、侧向航迹控制等系统,运用北斗导航定位的外界辅助导航,采用标准轨道制导与在线轨道制导相结合的方法进行内部制导。在可收到信号的飞行阶段,通过地面的监测站(或卫星)对轨迹进行优化,再传输数据给火箭上的系统(linux简化版等),在信号丢失的时间段可以主要使用自动驾驶仪进行计算得到最优轨迹所需的状态量,以直接力控制系统(侧喷通过调整力矩调整姿态,主推系统通过力调整速度)调整火箭至新状态量,从而满足在制导精度(多种导航结合),对回收平台的分辨率(传感器精度),反应时间(火箭内部实时控制)等方面的需求,还要增加火箭部件的冗余防止意外传感器等设备失灵。
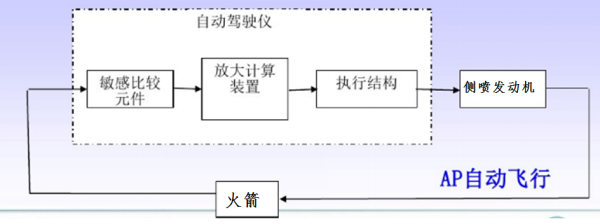
图4 自动驾驶仪示意图
3.3 再入段数据优化和轨迹优化
首先可以使用自适应滤波器来对传感器的数据进行降噪,通过各个传感器输入状态量(位置坐标X-Y-Z,速度v,加速度a,滚转μ,俯仰θ,偏航Ψ),要考虑到干扰力和干扰力矩对预定轨道进行调整,通过滤波器处理过的数据可以有效降低传感器的迟滞和漂移等问题,从而使数据具有更高的可靠性,并保证有一定的提前量来更加精确地调整火箭,从而实现数据优化。轨迹的优化是在数据优化的前提上进行的,在获得了足够可靠的数据后,便可以在制导方式上对轨迹进行优化。目前,技术比较成熟的制导方式是标准轨道制导,但是这种方式具有再入初始数据误差和外界因素干扰影响大等缺点,所以,选用与新式的在线轨道制导的方法相结合来进行导航制导,通过实时的轨迹优化调整来实现轨迹的优化。
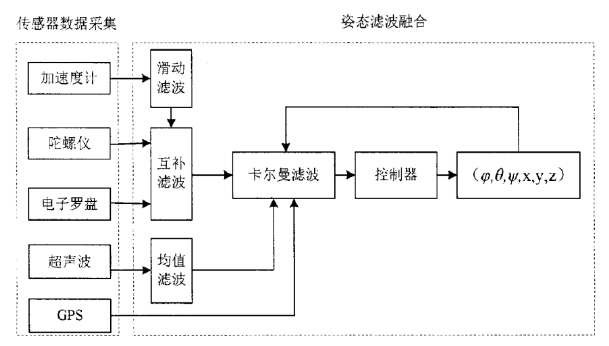 图5 数据处理示意图
图5 数据处理示意图
4 安全性与可靠性
4.1 RLV的安全性保障
要对火箭进行再入约束,如动压、热流、过载等方面有较大的可行域,能够控制火箭在其中较稳定地飞行。在飞行特性方面的参数,如最大抗风能力、最大偏航角度、最大倾斜角度、最大升降角度等方面进行约束。此外,还要给火箭加装一些保护措施,如电子系统保护、动力保护(火箭发动机如果熄火后能够在计算机控制下重启,或者有冗余的发动机可代替等)、特殊区域保护、低电量保护等。
4.2 回收塔的安全性保障
回收塔要通过视觉传感器实时监控一级火箭的姿态和速度,调整机械臂的位置防止无法控制住火箭的情况发生,在火箭箭体身上多装一组卡槽,防止滑脱等问题的发生。
5 结论
本文进行的基于回收塔式的可重复利用运载器体系设计在回收方式上和总体过程优化上有一定的创新性,旨在充分利用现有的地面能提供的帮助对整个可重复运载器体系进行优化,解决RLV在再入段和降落段所存在的多种问题,不再只局限于对飞行器的改造,通过地面设备来提高整个任务的安全性和可靠性。但是本设计方法还有待更深入的技术验证。在RLV技术火热发展的当下,希望本设计方案能为我国航天事业的发展做出一定的帮助,开创一个新的发展方向。
参考文献
[1]果琳丽,刘竹生,朱维增,等.未来运载火箭重复使用的途径选择及方案设想[J].导弹与航天运载技术,1998(6):1-7.
[2]司马光.猎鹰-9火箭第一级首次成功回收[J].国际太空,2016(1):42-46.
[3]汤一华,余梦伦,杨勇,等.可重复使用运载器再入在线制导方法研究[J].导弹与航天运载技术,2010(2):1-4.
[4]彭刚.再入姿态的自适应逆控制研究[D].西安:西北工业大学,2005.
(江苏省木渎高级中学)





