1 测速雷达的原理
雷达发射机能产生一定的电磁能量,这些能量可以通过天线辐射到大气中,并且能够在一个非常窄的方向上形成波束,进行传播。当雷达发射某一固定频率(24.15Ghz或者35GHz)的电磁波时,遇到活动的物体目标(如汽车等物体)后,能够沿着各个方向进行反射,其中一部分的能量反射到雷达发射的方向,形成相应的回波。回波的频率与发射波的频率之间,产生一个频率差,该频差称之为多普勒频率。根据多普勒频率的大小,则可以计算出目标相对雷达的运动速度。
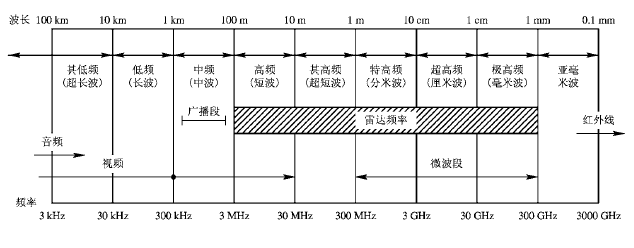
图1 雷达频率示意图
通过计算,在相同的采样数据的情况之下,35G雷达的每个采样点的理论分辨率为0.53km/h,而同款的24G雷达为0.55km/h。频率越高,多普勒频移越显著,多普勒测速的灵敏度也越高。
(1)雷达尺寸。频率越高,电磁波的波长越短,产生发射电磁波的发射管的尺寸就越小,这样重量也随之减小。
(2)波束宽度。雷达的波束宽度与波长成正比,与天线尺寸成反比。在相同的角分辨力的情况下,频率越高,波长越短,所需天线尺寸也越小。
(3)大气衰减。电磁波在大气中传播时,由于大气的吸收和散射而发生衰减,频率越高,衰减越多。频率越高,灵敏度也越高,对应的天线的实现更为复杂,稳定性更差一些。
2 信号处理步骤
采用的DSP处理平台为TMS320F2812。在对雷达接收信号进行处理时,雷达天线的接收部分,有一个中频放大模块,对信号(包括噪声和物体目标)进行中频放大,将放大后的中频信号进行AD采样,采样的数据为I和Q两路数据,然后对该数据进行快速傅里叶变换FFT。快速傅里叶变换FFT的目的是将I和Q两路的离散时间数字信号转换到对应的频域信号,通过分析频域信号,并针对噪声和杂波进行相应的处理,进而能够分辨出来运动的车辆目标。
TMS320F2812中的FFT模块含有TI库,通过对采样的两路I和Q信号的1024个点进行傅里叶变换,先对数据进行相应的排序,病采用基2的转换方式,该算法的计算速度要比普通的离散傅里叶变化快很多。通过FFT的转换,计算出1024个点中的噪声电平,并将计算出的噪声电平和FFT计算出的幅值,传输到下个目标模块中去。在后续的单元模块,对噪声和数据进行相应的处理,滤除噪声和杂波的影响,并在帧内和帧间对目标进行检测和处理,从而得到目标,计算出目标的速度,并在合适的位置运用相机,对目标进行抓拍,从而达到抓拍目标并输出目标速度的目的。
3 区分大小车的系统设计
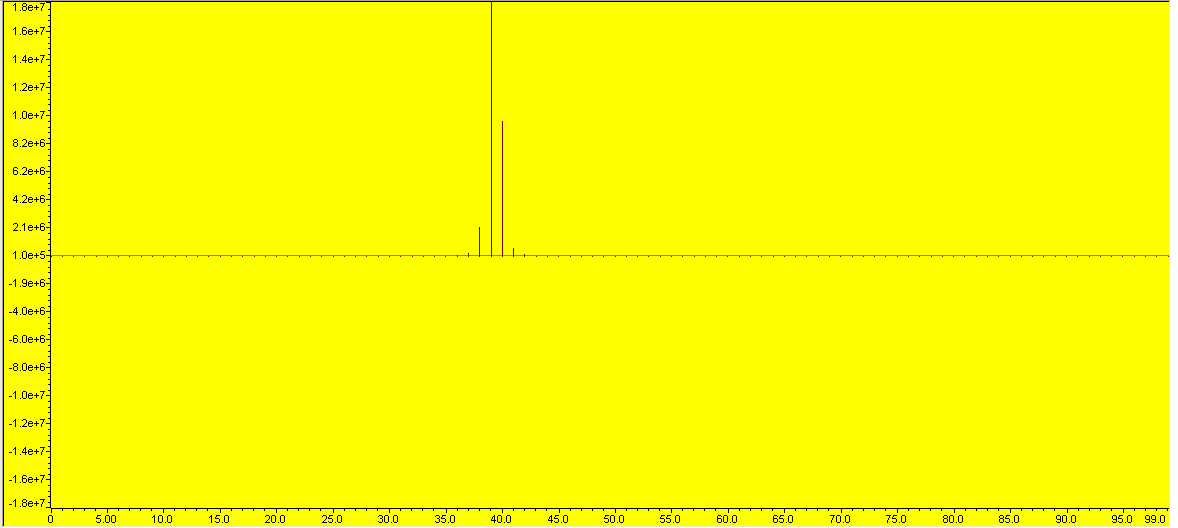
图2 小车的频谱图
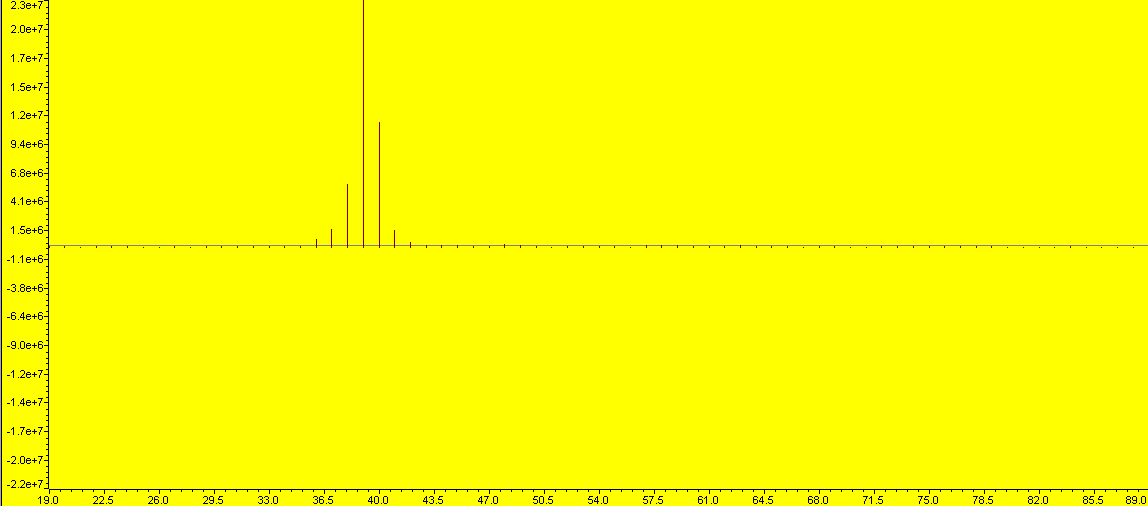
图3 中车的频谱图
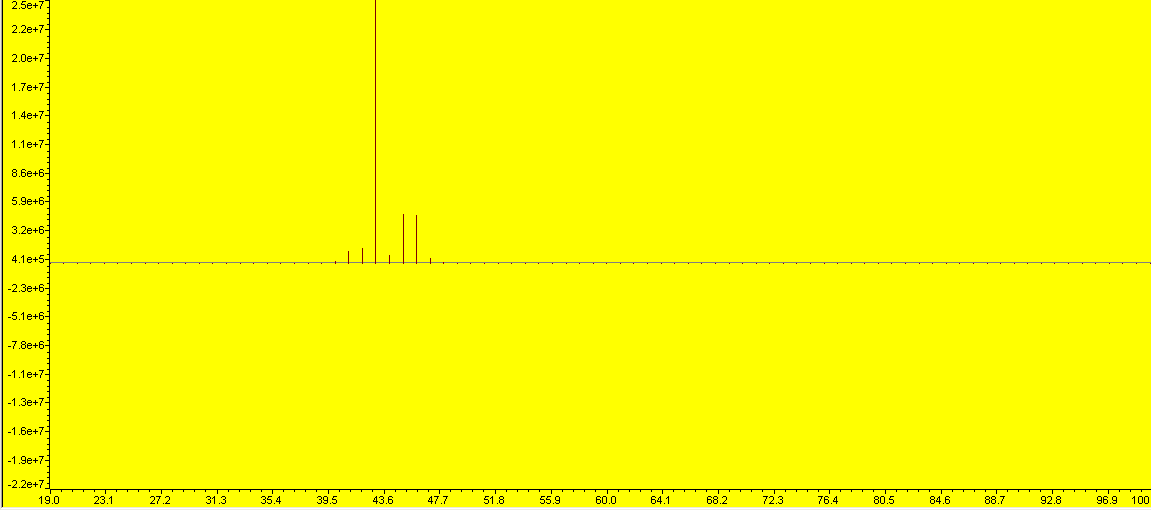
图4 大车的频谱图
从图2可以看出,雷达发射到小车上面的返回波的信号强度在1.6E+7左右;从图3可以看出,雷达发射到中车上面的返回波的信号强度在2.3E+7左右;从图4可以看出,雷达发射到大车上面的返回波的信号强度在2.5E+7左右。
从图2到图4可以得出,单纯的从雷达返回波的强度,对大小车进行的阈值判定,会很容易出现误判的情况,因为大车中车和小车的雷达信号返回波强度一般都在E+7的强度上。当然,在进行大量数据测试与统计的时候,也有一些大车在E+8的强度上,信号强度会是小车的10倍左右。因为不仅要考虑到雷达信号和运动物体之间的关联性,还要考虑到周围其他噪声等信号的影响。因此,叠加上噪声的影响,出现一个固定值的阈值设定,对判定大小车是无效的。
小车跟大车另外一个标志性不同点是,大车的长度一般是小车的两到三倍以上的长度。因此在DSP平台上,对转化为数字信号的雷达波,可以通过统计帧数来进行判定。具体的做法是,对大小车设置一个统一的信号强度(也可以动态设置,根据雷达性能的不同进行动态调整),例如设置为1.2E+7,然后对大于这个阈值的帧数进行统计。例如,在雷达照射的这个区域内,小车的帧数进行大数据统计,一般数目为10帧,而中车的帧数一般为20帧左右,大车的帧数一般为30帧以上。根据帧数的统计结果,则可以进行帧数的设置。设置15帧以下的判定为小车,15~25帧的为中车,25帧以上的为大车。
通过DSP模数转换、IQ信号的交织、信号能量的增强,通过阈值的判定,很容易将噪声和杂波过滤出去。而通过帧数的一个统计则很容易对大车、中车和小车进行区分。并且综合利用好阈值的设定以及帧数的一个设置,可以保证拍摄到的车辆的位置,非常适合于车牌信息的设备,并保证拍摄位置的稳定性。
因此,通过频谱图上面的大小车的不同的幅度以及反射回来的帧的数目,以及其他方面的细分算法,则可以非常高效地对大中小车进行区分与判定,从而达到区分的目的。
4 程序的烧录
打开CCS3.3,选择C28xx,仿真器选择xds510 emulator。连接好仿真器、目标板和电源,进行相关的配置,点击Execute Operation,执行烧写操作,将生成的out文件烧录到雷达中。
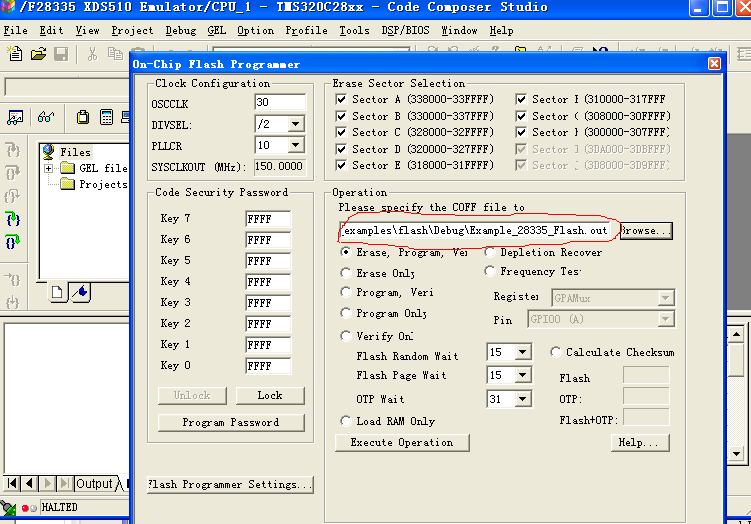
图5 文件的烧录
5 综合抓拍效果测试
图6为打车的抓拍效果图,左下侧判定的车辆类型为大车,符合实际情况。

图6 判定为大车的情况
图7为打车的抓拍效果图,左下侧判定的车辆类型为小车,符合实际情况。

图7 判定为小车的情况
在高速公路上,通过对雷达测速仪进行设定,例如大车的限速为100km/h、小车的限速为120km/h,这样就可以解决在测速仪上只能统一限速为固定值的问题,从而能够区分大小车,并对大小车进行不同限速。
参考文献
[1]何洪宁,仝大伟.35G高性能窄波平板雷达产品总体设计[J].中国新通信,2017,19(2):162-163.
[2]何洪宁,仝大伟.24G测距平板雷达产品总体设计[J].通讯世界,2017(1):266-267.
[3]贾兴泉.连续波雷达数据处理[M].北京:国防工业出版社,2005.
[4]刘国岁.随机信号理论与应用[M].北京:兵器工业出版社,1992.
(作者何洪宁系南京市产品质量监督检验院中级工程师)





