0 引言
在美国2015年9月发布的《空军未来作战概念》(Air Force Future Operation Concept)与2014年发布的《美国空军“召唤未来”》(America’s Air Force: Call to the Future)中,制定了对于未来2035年以后美军空中作战能力将要达到的目标,设计了要实现不对等优势的空中作战能力的战略计划。这种不对等优势包括:灵活、快速、平衡、协调、力量,分别对应作战上的联合多域操作能力、超快速决策能力、综合能力与平衡、动态指挥控制、作战团队效能优化。在人机交互层面,提出了人机系统综合,从而能够通过分别发挥飞行员与自动化机载航电系统的优势来提高飞行任务的效能,使得整体人机综合系统具有广域的态势感知能力、高效的人机接口、大数据传输、高安全性、高可靠性、可灵活重组的能力、高效的任务选取能力、精确的目标瞄准能力。作为人机系统中最重要的交互环境,座舱的输入、显示等系统需要紧跟未来空中作战的灵活、快速等特点,提供高效、灵活可组、高安全可靠性等的人机交互能力。如今,战斗机飞行员需要同时地进行多任务的操作及决策,如监视不明飞机、观察战地状况、瞄准目标、接收后方指令等。如果在众多作战任务的同时,还要进行仪表面板操作、与空中、地面进行通信等,不仅应对不了现在的空中多任务作战需求,更无法跟上未来空中作战中广域态势感知、战地数据收集及处理、高效决策等需求。所以,想要在未来战场中拥有空域对抗能力,使得飞机真正能达到人机综合、协同作战,共同发挥人、机最大作战优势,主要决定因素就在与人机交互系统的先进能力。现阶段,在人机交互中的3D投影技术已接近完善,而激光定位技术也已成熟,但激光定位却有数据量大,有盲区,成本高等缺点,无法广泛应用于飞机驾驶舱和飞行模拟器。
因此,要设计好人机交互平台,首要任务就是应用一套新的定位技术。本文将提出一种全新的利用磁场强度的定位方法,它将会为构建出新的人机交互平台和将新型人机交互平台应用在驾驶舱中提供可能。
1 系统架构设计方案
根据驾驶座舱内高精度、高可靠性定位的要求,人机界面交互系统需要一种磁定位数据手套来收集信息进行定位。数据手套上配置有磁传感器,这些传感器体积较小,可以安装在手指的指尖或者是手掌的背面,从而形成一套方便的可穿戴的3D输入设备,即人机交互接口。系统的整体架构如图1所示,整个原型系统分为硬件部分和软件两大部分。
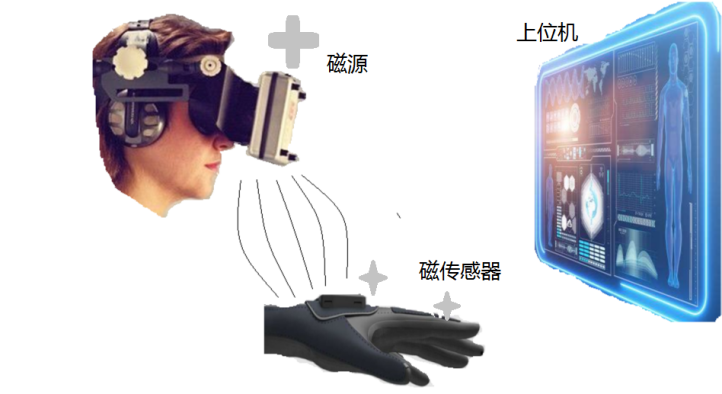
图1 系统结构设计图
该人机交互系统的硬件包括发射机和接收器,也就是一组带有线圈传感器的手套和位于头盔的磁源发射端以及用于电路数据采集与处理的处理器。软件部分包括人机界面中的上位机和数据采集分析算法程序。线圈传感器通过磁感应现象,能表示出空间位置处磁场的强度及其变化的信息,由磁定位算法计算确定驾驶员手的方向和位置。安装在手背上的三轴线圈传感器,可以测量手掌与头部的相对位置,而指尖上的指尖磁传感器,只需要计算手指与手掌指尖的位置变化关系,可以确保测量精度。
2 磁耦合定位算法设计
本文所讲述的算法是通过磁场强度来计算空间位置信息。磁场的信息传输实际上是依靠发送器和接收器之间的线圈之间的感应。这两个线圈可以被建模为初级线圈和次级线圈所形成的磁感应电路。
因为数据手套系统使用的极低频信号波长远大于发射机和接收机之间的距离,而且,磁场发射源的尺寸和接收传感器的尺寸也远小于它们的距离。所以用于定位的磁场模型每个轴可以等效于磁偶极子模型。在电磁定位算法中,电流强度接收器的空间位置与距离和角度有关。在接收机和发射机之间,距离与接收机相对于发射机的角度可以通过电磁计算参考并建立坐标系统如图2所示。接收磁感应强度是:
 (1)
(1)
式中, 表示接收到的磁感应强度的径向分量和正态分量,N表示每匝数,I是线圈中的电流,A表示线圈的面积。
表示接收到的磁感应强度的径向分量和正态分量,N表示每匝数,I是线圈中的电流,A表示线圈的面积。
在三轴磁定位系统中,假设接收线圈相对发射线圈的坐标为 把它变换到柱坐标系中,即为(ρ,α,β)分别表示距离、方位角和偏转角。发射端与接收端的空间位置关系如图2所示。
把它变换到柱坐标系中,即为(ρ,α,β)分别表示距离、方位角和偏转角。发射端与接收端的空间位置关系如图2所示。
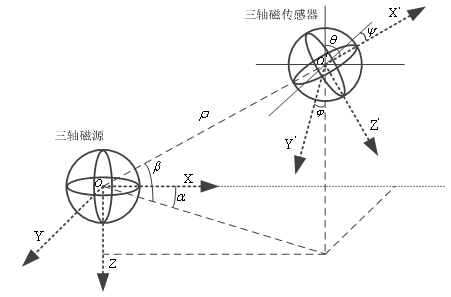
图2 接收端相对于发射端的空间位置关系
假设发射线圈发射的矢量矩阵为:
 (2)
(2)
它表示每个时刻三轴发射线圈分别发送一个大小和幅度都相同的磁信号,发射矢量矩阵在经过坐标转换后,等效的发射磁场为:
 (3)
(3)
式中, 为坐标转换矩阵,表示发射矢量沿方位角和俯仰角的发射变换:
为坐标转换矩阵,表示发射矢量沿方位角和俯仰角的发射变换:
 (4)
(4)
 (5)
(5)
接收端位置处三轴线圈接收到的磁感应强度为:
 (6)
(6)
在原坐标系下,该磁感应强度可以进一步表示为:
又由勾股定理可知:
然后,进行方位角的解算,由于在接收端坐标系中,接收磁场矩阵可以表示为:
通过以上计算过程即可得到驾驶员头部和手部之间的位置关系,从而为人机交互系统提供定位支持。
3 仿真分析
仿真和实验结果仿真的目的是测试数据手套系统的准确性。仿真参数如表1所示。
表1 主要的仿真参数
| 仿真参数 | 数值 |
| 载波频率 | 40kHz |
| 采样频率 | 20MHz |
| 定位数据刷新频率 | 225Hz |
| 脉冲占空比 | 1/6 |
在不同信噪比下的定位误差如图4所示,可以明显看出,传统的电磁跟踪方案在距离定位上具有较高的精度,但在角度的确定上存在着一定的定位误差。
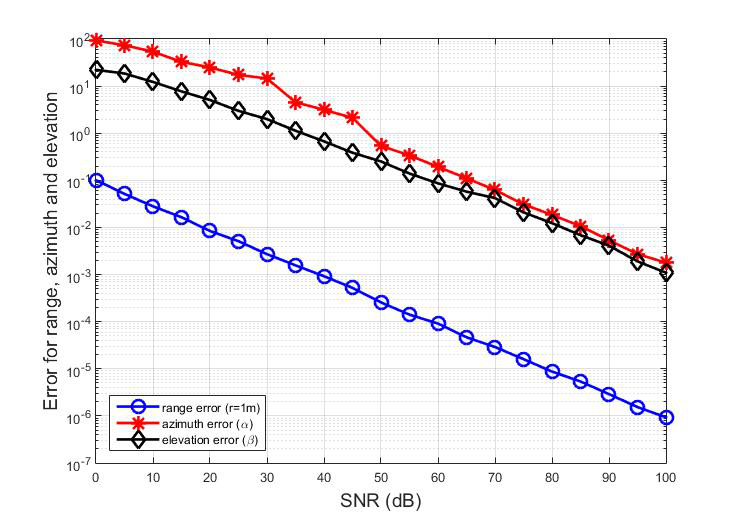
图4 定位误差随信噪比的变化仿真曲线
在定位算法的仿真验证中,发射机在不同的时间分别发送3个正弦信号,每个正弦信号持续2ms。在传感器各轴上的接收信号显示在示波器中,接收信号的幅值和相位信息可以通过调节电路得到。定位算法预装定和校正系统的参数信息,可以更加精确地计算获得发射机与接收机之间的距离和方位角。本文提出的定位方法可以利用高精度距离定位的方式,通过解模糊度来直接确定指尖的空间坐标。三维坐标轴下的定位仿真结果如图5所示,在仿真中信号的有效传输距离可达1m以上,当信噪比约为20dB时,定位结果比较令人满意。特别是,在1m的测量范围内,定位精度可以达到毫米量级,这种精确度对于数据手套的应用来说是可以满足目前各类模拟操作系统的控制要求的。
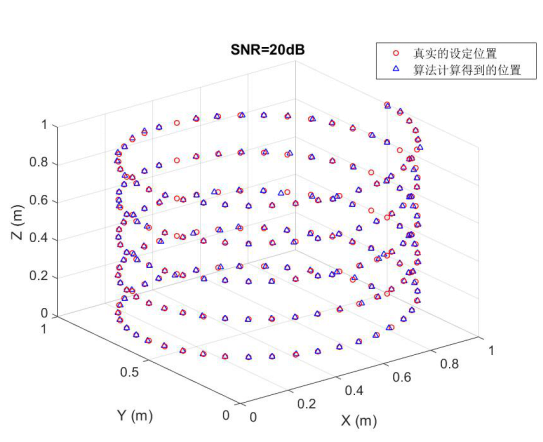
图5 举例仿真三维坐标轴下的定位结果
最后,可以将本文提出的磁定位方法与传统的基于推航定位的方法进行仿真对比。当信噪比相同时,本文提出的磁定位法的定位精度高于基于推航定位的定位法,这是由于传统的推航定位法采用了大量的近似处理,损失了定位精度。
4 结论
本文提出了一种未来驾驶舱的设计构想,并提出一套用磁场进行定位的人机交互系统,还介绍了磁定位人机交互系统的组成以及数据手套的结构。为了达到高精度的标准,本文还为数据手套上加了多个传感器。仿真结果和实验结果很好的验证了本文所提出方法的正确性和有效性,为未来飞机座舱的设计提供了创新性的设计参考。
参考文献
[1]刘璐.飞机座舱内部布置人机工效设计方法研究[D].南京:南京航空航天大学,2016.
[2]王俊.轻型运动飞机座舱人机界面设计与分析研究[D].南京:南京航空航天大学,2010.
[3]苏建民.飞机座舱设计人机交互技术研究[D].西安:西北工业大学,2002.
[4]刘奇付,李紫艳.舰船磁定位算法实现及计算分析[J].舰船科学技术,2016,38(2):58-60.
[5]任宇鹏,胡超,项圣,等.一种人体移动对胶囊内窥镜磁定位干扰的补偿方法[J].传感技术学报,2015,28(11):1640-1646.
[6]郑弋源.民用飞机驾驶舱人机交互机理与评价方法研究[D].上海:上海交通大学,2015.
[7]杜承阳,陈晓冬,牛德森,等.一种基于多磁偶极子模型的磁传感手术导航方法[J].中国激光,2015,42(8):121-125.
(西安市八十五中学)





